




株式会社アールティは、6月1日から、上半身ヒューマノイド型研究用17軸ロボット「Sciurus17(シューラスセブンティーン、以下シューラス)」をアカデミック、研究用途向けに発売、受注を開始した。
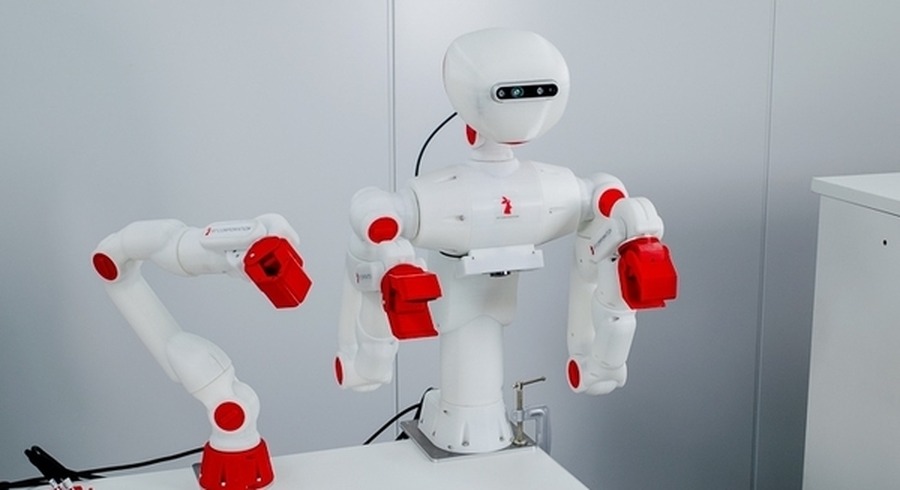
上半身ヒューマノイド型研究用17軸ロボット「シューラス」は、頭部に3次元距離カメラを搭載し、位置・速度・電流(トルク)等の情報により両腕のアームを制御することができる上半身人型ロボット。サービスロボットの開発用プラットフォームとして、両手を使うタスクや軽作業の研究用に開発されている。作業有効範囲は直径1.2m、可搬重量は約0.5kg。サイズは200mm x 390mm x 480mmとコンパクトなロボットだ。アールティは人とロボットが共に働く「協働ロボット」の開発を行なってきており、今回のシューラスのデザインからも、協働ロボットの研究のために使って欲しいという意図を感じる。
Sciurus(シューラス)は「リス属」という意味。背中が丸まっていて、手を前に出して作業している見た目がリスのようであることから名付けられた。
アールティが目指すロボットは「生き物のような、自然な動きができるロボット」。そのほかの製品にも動物を絡めた名前が付いている。
シューラスは、両腕とも7軸の冗長性を有し、障害物をよけながらタスクをこなすコントロールが可能。また、腰軸を有効的に活用することによりアームの作動範囲を拡張できる。両腕7軸のほか、頭部(首)2軸、腰1軸の自由度をもつ。頭部のDepthカメラには、IntelのRealSenseが使用されている。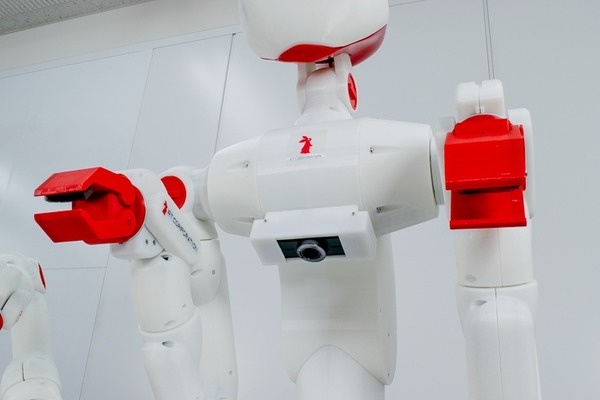
双腕ロボットの価格は「500万円以上のものが多い」と同社代表の中川友紀子さん。外装に3Dプリンタを活用することにより、低価格を実現。300万円で販売し、ロボットの研究開発での活用を目指す。フリーウェアであるROS(Kinetic Kame)に対応し、その豊富なパッケージを利用することできる。双腕ロボットにこんな実験をさせてみたいと考える研究者も多いことだろう。
また、こちらの動画は本ロボットの大本になる技術。下のお盆を回しても、角速度センサの値を使って力加減を適切に制御しているから、滑らかに自己姿勢を保てる。シューラスやクラインは、このような基礎技術を応用。3次元的に力加減を制御してアームロボットを動かしている。実際に触ってみると従来のロボットとはイメージが違う。リアルタイムに変化を感知してぬるぬると動く様子に、アールティの技術力の高さを垣間見ることができる。
なお、本ロボットは本日6月4日と5日の2日間、北九州市小倉の西日本総合展示場にて開催されている「ロボティクス・メカトロニクス講演会2018」併催の企業展示のブースにて実物を展示される予定だ。
