
丸紅ネットワークソリューションズは富士急行と協力し、2020年7月より富士急行線(大月~河口湖)にある第1種踏切道(自動遮断機、警報機が設置されている踏切道)及び、第4種踏切道(踏切警標のみで列車の接近を知らせる装置の無い踏切道、上の画像がイメージ)にて、AI機能を搭載した「TRASCOPE-AIカメラ」による滞留検知システムの実証実験を進めている。
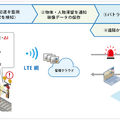
同システムでは丸紅ネットワークソリューションズが提供するAI分析映像監視サービス「TRASCOPE-AI」を利用し、内蔵の演算装置(GPU)でカメラが取得した映像データを処理する。TRASCOPE-AIカメラでは物体の形状を認識し滞留を検知する「物体検知」と、人物の移動・滞留を検知する「骨格検知」の複数のAIアルゴリズムを実装しており、複数のAIアルゴリズムを用いて、「踏切道内に置かれた物体」「踏切道内に滞留した人物」を検知し、リアルタイムに遠隔にいる富士急行の運転指令所へ通知する。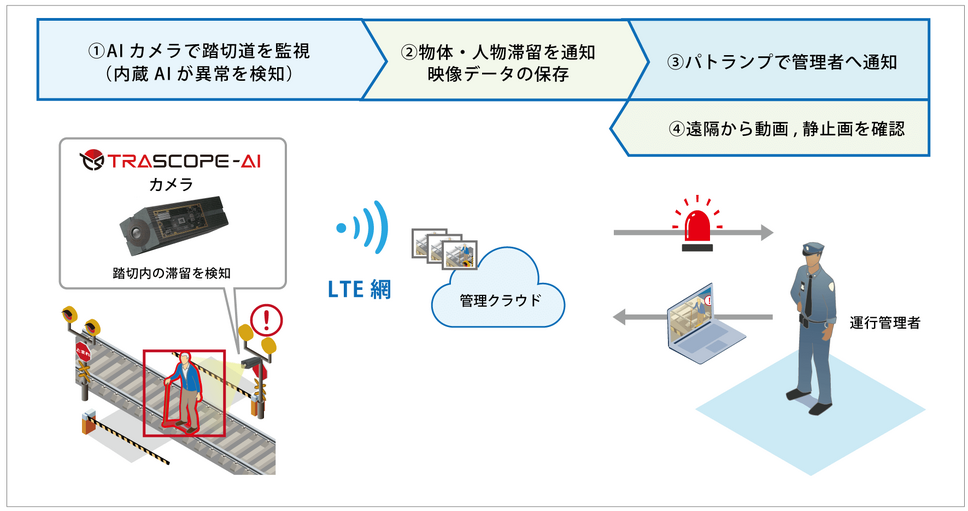
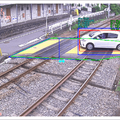
【第1種踏切道:滞留検知画像イメージ】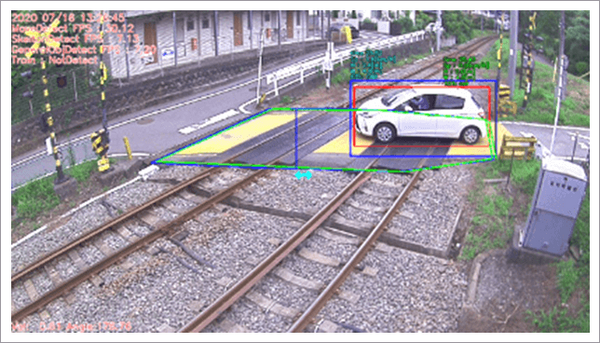
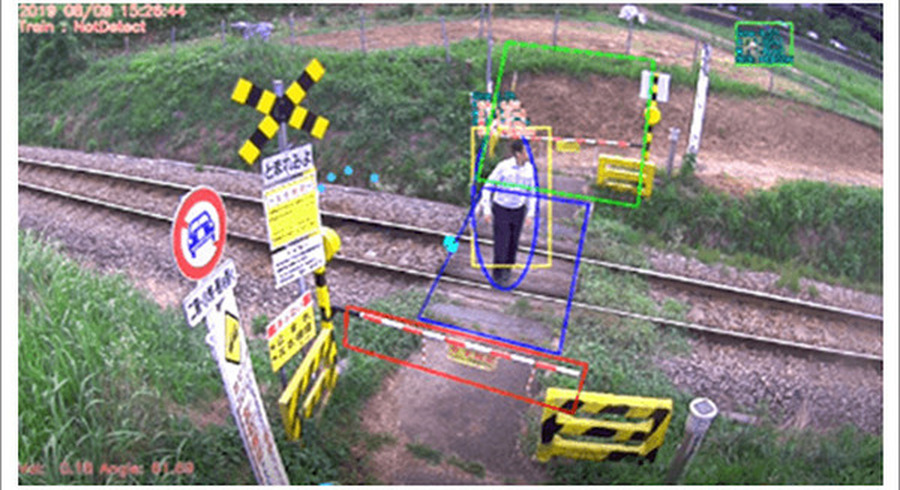
【第4種踏切道:滞留検知画像イメージ】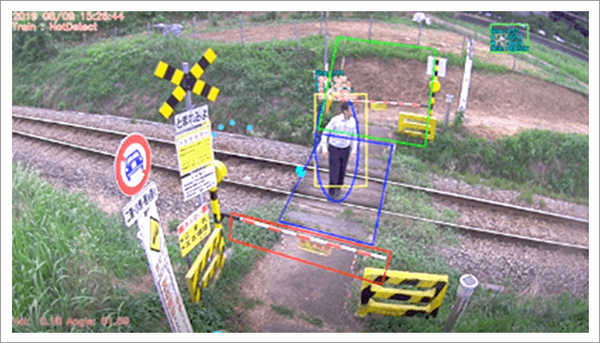
「骨格検知」、俗に言うホネホネ検出は、これまで危険エリアへの人物の侵入検知で培ってきたAIアルゴリズムであり、踏切道での人物の滞留検知に応用。この方式はディープラーニングによる画像中の関節点抽出、及び各関節点の接続状態推定により、画像内の人物骨格を検知する。関節点間の繋がりの強さも学習対象とすることで、精度良く人物の検出が可能になる。
【骨格検知 概念図】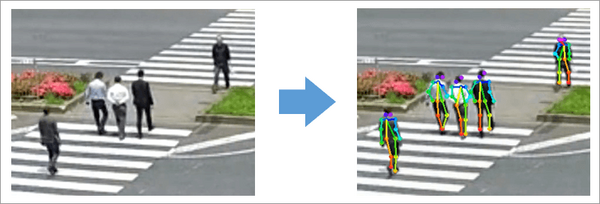
同システムの実証実験は2019年8月から開始し、富士急行の運転指令所において、遠隔から第4種踏切道の横断者状況を正確に把握でき、踏切道の安全性向上に効果があることを実証。上述の効果を踏まえ、2020年7月より第1種踏切においても実証実験を開始した。2020年10月からは隣接する電柱にパトランプを設置し、踏切道内に滞留する人物や物体の検知を電車運転士へ直接注意喚起する実験も行い、さらなる安全性向上へ努めている。
