







ヤマハ発動機は農作業の自動化と省力化を目指して汎用性の高い無人走行車両の開発に取り組んでいる。2020年12月17日には株式会社リュードヴァン(長野県東御市祢津)のブドウ畑において、開発中のUGV(無人走行車両)を使った収穫および運搬作業の自動化を想定した試験を実施し、その様子をYouTube公式チャンネルにて公開した。

今年はブドウ収穫UGVのプロトモデルをアメリカに送って、現地で開発を進める計画。また、同時にさまざまな専門性を持ったパートナーと出会うことで、開発を加速させたいとしている。
高度な技術を獲得して幅広い活用へ
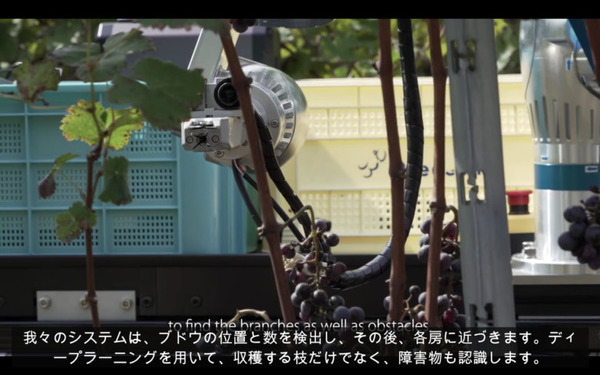
農業の担い手の労働人口不足は先進国全体の課題となっており、省力化・自動化が切望される分野。ヤマハ発動機が汎用性の高い農業用UGVの開発に取り組む中、現在、ブドウの収穫と運搬に注力しているのは、他の農作物より難易度の高い技術が求められるからにほかならない。ブドウの位置や数を検出して収穫すべき房に近づくためには、複雑に入り組んだ枝などの障害物を避ける技術なども必要。ディープラーニングを用いてこうした課題を一つずつ解消しながら、将来的にはより幅広い用途での活用を目指している。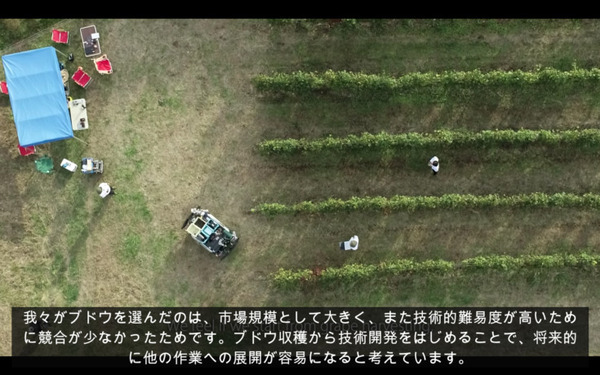




たとえば、北海道のジャガイモ畑では現在農業情報設計社や生産者である池守農場との協力で、UGVによる野良イモ駆除の試験が進められている。野良イモとは前年の収穫期にこぼれた子イモが越冬して雑草化したもので、これを駆除するための作業が生産者にとって大きな労働負担となっている。開発チームが目指しているのは屋内にいながらにして野良イモの駆除を行うシステム。遠隔操作と自動運転の技術を組み合わせることで、省力化に直結するソリューションを導き出そうと取り組んでいる。
【動画】UGVを使った収穫および運搬作業の自動化を想定した試験
「畑のような半自然環境に無人のロボティクス技術を導入するためには、モビリティとロボティクスの技術を高度に融合させることが不可欠です。当社はその二つを事業として展開している世界的にも珍しいユニークな存在ですから、この領域での社会課題解決に貢献できると考えています」。そう話すのは、ヤマハ発動機FSR開発部の西村啓二氏。
日本をはじめ先進各国では、農業における労働力不足がますます深刻化している。西村氏は「現在のシステムではGPSを使って作業点まで移動を行いますが、AI技術を用いて自律的な走行を可能にすれば、農業だけでなく、林業や漁業などさらに幅広い領域で人々の生活の基盤となる産業に貢献できると考えています」と述べている。
ヤマハ発が自動飛行ドローンによる散布の実証実験 JAなどと「スマート農業」推進 静岡県浜松市のばれいしょ畑にて
【JAL×ヤマハ発】長崎で水揚げされた鮮魚をすぐに首都圏の飲食店へ 無人ヘリを活用した実証実験を日本航空が公開
ヤマハ発動機 関連記事
ヤマハ発動機












