


物流倉庫に新しく無人搬送車(AGV)や運搬ロボット等の搬送機器を導入しようとすると「業務が変化した」「担当者が変わった」「運用を変えたい」といった“変化”への対応がまず求められる。
日々変わる現場の業務に搬送機器が対応するため、再セットアップする必要があったり、そもそも通路が荷物で占有され搬送機器が使用できなくなったりと、現場の変化に対して追加コストや障害が発生してしまう。そのような理由から、搬送作業は機械に頼らず人手で対応するほうが早いと考え、現場改善が後戻りするケースもあることなどが搬送機器を活用する際の業務プロセス上の課題であった。
株式会社Doogは、大型物流倉庫において、これらの課題を解決するため、ボタン1つで地図と走行ルートの作成が行え、これらの再作成・変更も容易な「自動走行機能」であるメモリトレース技術の開発を進めており、この度、協働運搬ロボット【サウザーEシリーズ】の運用・導入を確立するための稼働性検証を行ったことを2021年5月27日に発表した。
なお、この取り組みは、同ロボットの販売及びシステム開発で連携する日立物流ソフトウェア株式会社の協力により実現したものだ。
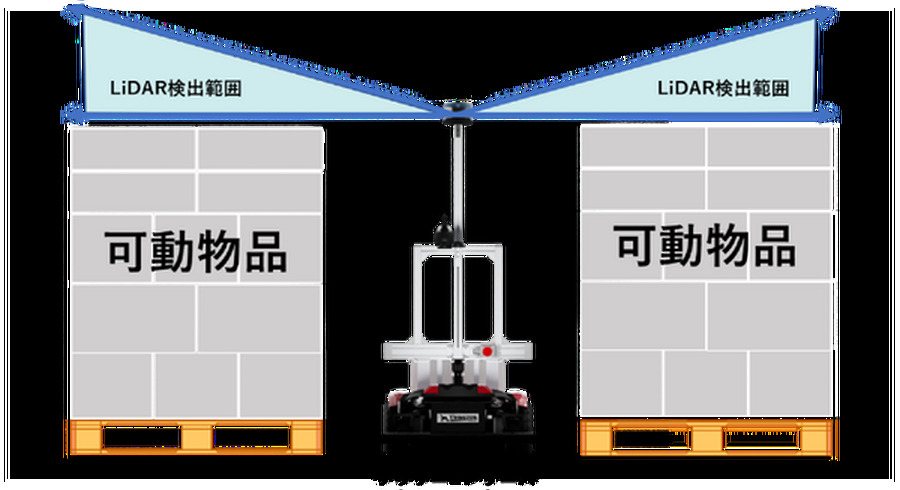
(※冒頭の画像:追加搭載したLiDARの視野範囲イメージ)
検証実行に至った背景
物流倉庫では、運搬ロボットを活用するにあたり、荷主の変化で現場の配置が変わることや、商品の需給バランスの変化、時期による倉庫内の変化が大きい点、コンベアや自動倉庫などの大規模な運用を除き人手で業務を回す必要が生じるといった業務プロセス上の課題がある。
AGVの中には、磁気式ラインテープに沿って走行するものもあるが、倉庫内を走行するリーチフォークリフトのタイヤによりテープが破断することで運用が滞る懸念から導入が困難といった課題があった。また、AMRと呼ばれるガイドレス方式自動走行ロボットでは、周辺環境の変化に弱いといった問題もある。特に、ラック棚の荷物の有無や、トラックゲート周辺のシャッターの開閉状態、トラックの有無等によって環境形状が変化するため、あらかじめ作成した地図との対応付けが取れなくなり、思うように走行できず、結果的に導入出来ないケースもでていた。これらのように、従来のガイド方式およびガイドレス方式のいずれにおいても現場の要求スペックを満たせないといったケースなど、「環境変化への対応力」が物流搬送機器に求められている現状がある。
▼物流倉庫でのAGV運用における課題
| 1. | 荷主の変化で現場の配置が変わる |
|---|---|
| 2. | 商品の需給バランスの変化、時期による倉庫内の変化が大きい |
| 3. | コンベアや自動倉庫などの大規模な運用を除き、人手で業務を回す必要がある |
今回の検証について
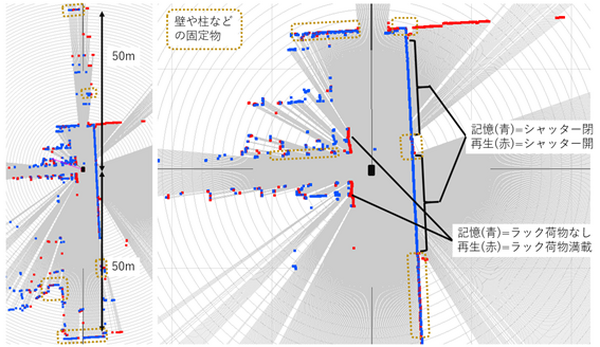
同検証では、サウザーに標準搭載されたLiDARの他に、高い位置に追加搭載されたLiDAR(冒頭の画像)を用い、建物内で環境変化が少ない領域(地上3m等、サウザーの周囲で可動する台車や床置きパレット・荷物の影響を受けない高い位置)を優先的にセンシングすることで、環境変化に負けない自動走行を実現。サウザーEシリーズに対して最長200mまで計測可能な3D-LiDARを追加搭載した。また、メモリトレースの環境認識アルゴリズムにも改良を加え、モノ移動が多く環境変化が激しい物流倉庫においても安定して走行できる要素技術を開発。具体的には、倉庫内の荷物や環境条件に変化が生じた場合であっても、センシングした3D形状のデータから、可動物品と固定物とを厳密に見極め、壁や柱や棚などの固定物形状を特徴点として正確に抽出できるアルゴリズムを搭載した。
加えて、作成した地図が環境変化に対応しきれなくなった場合であっても、現場の担当者自身で記憶データを再セットアップできるため復旧が容易であり、業務の状況に応じて運用を変更した場合であっても、簡単に改善活動を繰り返すことができる。
検証を実施した内容
物流倉庫内では、トラックヤード脇の導線が最も変化の激しい場所とされている。そこで同検証では、大型シャッターの開閉や荷物ラックの有無を変化させ、これらの環境変化に対し、メモリトレースが有効に機能することを確認。その結果、下記の環境変化があったとしても、サウザーEシリーズのメモリトレースで安定かつ正常に走行できることが判明した。
【現場環境と変化の具体例】
検証通路の片側には長さ10m程度のシャッターが2枚ある。記憶時には閉鎖し、メモリトレースでの自動走行時には開放して、意図的に環境変化を生じさせた。また、シャッターの反対側には長さ3m程度の荷物ラックがあるが、同荷物ラックにも意図的に環境変化を生じさせた。記憶時には棚が空の状態とし、自動走行時には隙間なく満載されているよう、環境変化を変化させた。

想定の運用内容
同現場では、メモリトレースの特徴を生かし、曜日で運用をがらりと変えるという、物流倉庫での流動的な搬送業務を自動化する試みが検討されている。短いスパンでの大きな運用変更が容易であることがメモリトレースのポイントだ。
【計画している運用例】
| 1. | 特定の曜日では、往復路で6輪カートを3台牽引して搬送。経路の始点・終点には作業者がおり、カートの送り出しと受け取りを1日に数百台単位で行う。 |
|---|---|
| 2. | 別の曜日では、サウザーがハンドパレットトラックを牽引。リーチフォークリフトの作業者が経路の始点・終点で荷物を搭載し、無線式のボタンでリーチフォークリフトに乗ったままサウザーに走行スタート指示をする。 |
| 3. | 別の曜日には別ルートを往復し、不定形な業務として代表される6輪カートの回収や移動では、自動追従機能を活用。 |
| 4. | サウザーのライントレース機能とメモリトレース機能を併用することも想定。今後の変化する業務にも柔軟に応えられるよう事前に施策を講じる。 |
■【動画】【参考】サウザーベーシックのメモリトレースを社内倉庫で動かして限界を確認してみた
今後の取り組みについて
同社では、今後、メモリトレースを搭載したサウザーEシリーズを「業務改善パッケージ」として確立し、サウザー販売事業者から提供する準備を進めていくとのことだ。また、サウザーEシリーズのライントレース機能における耐フォークリフト性能向上として再帰反射塗料の利用やソフトウェアの改良なども継続しておこなう。また、同社シンガポール子会社では、今回の発表と同様の取り組みをアパレルブランドの3PLを請け負う欧州の物流会社や、食品製造現場向けなど複数個所に先行導入済みであり、さらなる拡販を進めて行く予定だ。