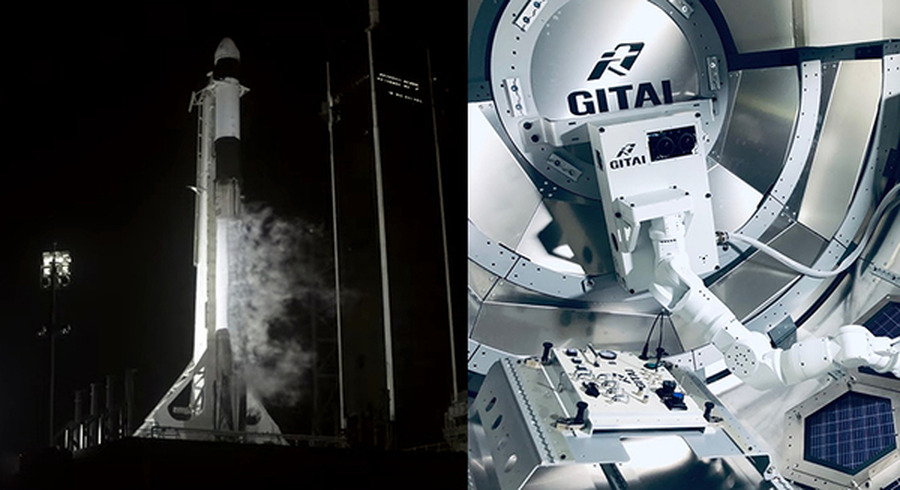
宇宙用汎用作業ロボットを開発するGITAI Japan株式会社は、2021年度にISS(国際宇宙ステーション)船内で実施予定のGITAIロボットによる汎用作業遂行技術実証について、日本時間の8月29日(日)、16時14分にGITAIロボットを搭載したSpaceXロケットが打ち上げに成功したことを発表した。
SpaceXロケットは日本時間8月30日(月) 23時30分に国際宇宙ステーション(ISS)に到着、ドッキングにも成功し、GITAIロボットは無事ISSに届けられたという。
GITAIロボットはISSの船内での汎用作業を遂行する技術実証にのぞむ予定で、スケジュールは今年10月頃が予定されている。(※現在NASAによるスケジュール調整中)
■動画 SpaceX社によるISSへのロケット打ち上げ(SpaceX CRS-23 Rocket)
NASA公式サイト上のGITAI技術実証について
ISS船内でロボットの技術実証
GITAIは、米国民間宇宙企業Nanoracks社と共同で、2021年度にISS(国際宇宙ステーション)のBishopエアロック船内で、GITAIロボットによる汎用作業遂行技術実証を行う。
GITAIが宇宙用ロボットアームS1に関する全ての開発を担当し、Nanoracks社は打ち上げ機会の提供、軌道上での運用管理、データのダウンリンクを担当する。NASAが宇宙用ロボットアームS1の輸送とISSのBishop船内への(NASA宇宙飛行士による)設置を担当する。
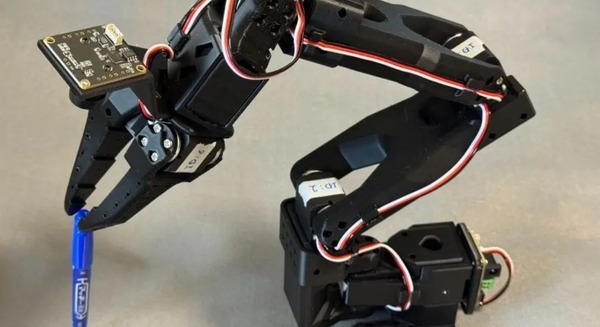
この技術実証では、GITAIが開発した宇宙用ロボットアームS1をISSのBishopエアロック船内に設置し、スイッチ・ケーブル操作等のISS船内作業と、宇宙用パネル組み立て等の宇宙組立作業の2種類の作業をGITAIロボットアームS1で遂行。GITAIロボットアームS1による全作業は最初に自律制御によって遂行し、その後にヒューストンのNanoracks社管制室からの遠隔操作によっても遂行する。
■動画 S1による宇宙組み立て作業模擬タスクの実施状況(GITAI社内にて撮影)
GITAIは本技術実証を通して、宇宙で汎用的な作業を遂行可能な宇宙用自律ロボット技術の獲得を目指す。 また、本技術実証を通して培った技術を、軌道上サービスにおけるドッキング・修理・メンテナンス作業が可能な船外ロボットアームの開発や、月面探査・基地開発作業が可能な船外汎用作業ロボットの開発に繋げるとしている。