

米国と中国を中心に月面資源探査・基地開発競争が加速している。その中にあって、従来の人間の宇宙飛行士よりも安価で安全なロボット労働力の需要が急増しているという。
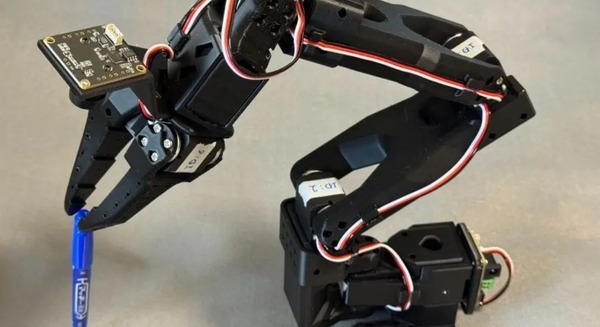
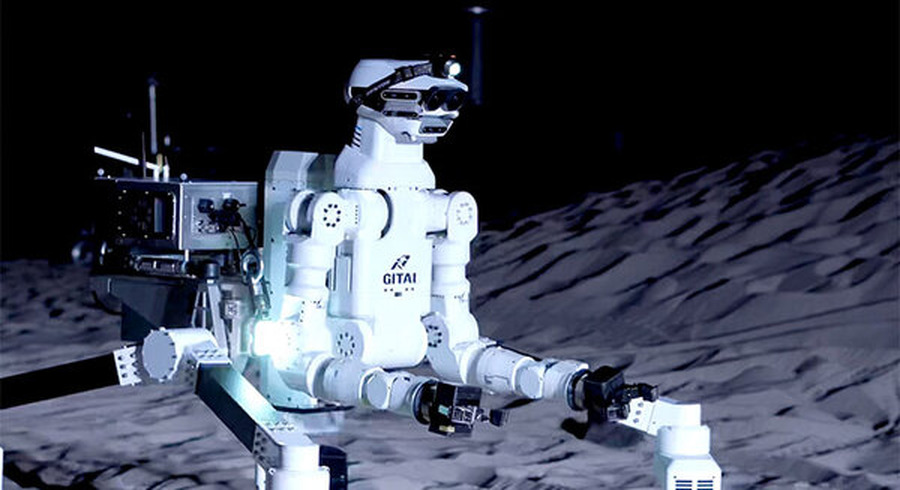
GITAIは、月面で探査、採掘、点検、保守運用、宇宙組み立て等の汎用的な作業が可能な最新型の月面作業用ロボットローバーR1を開発したことを発表した。
2021年12月に、JAXA相模原の模擬月面環境でGITAI月面作業用ロボットローバーR1による複数の作業・走行試験を実施し、予定していた全ての試験に成功し、その実証動画を公開した。
■動画
月面作業用ロボットローバーR1による模擬月面環境での実証実験
この地上実証では、JAXA相模原の模擬月面環境で、最新型のGITAI月面作業用ロボットローバーR1による以下の4点の試験を行い、全ての試験に成功した。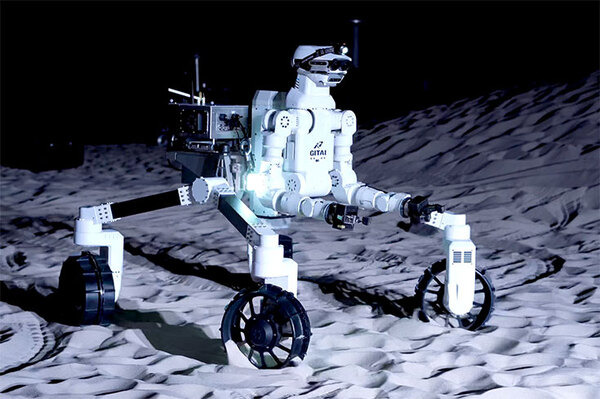
1.走行・移動・障害物走破試験
GITAI月面作業用ロボットローバーR1が模擬月面上を移動し、数十cmサイズの岩も乗り越えて移動可能な走行性能があることを確認した。これは、全方向に向きを変えることができる特殊な脚を備えることで、全方向への移動・障害物走破性能がある。
2.ソーラーパネル組み立て試験
NASAが構想する月面基地開発において重要となる、月面での複雑な構造物(※ソーラーパネル・通信アンテナ等)の組み立てに必要な一連の作業を実施した。
具体的には、GITAI月面作業用ロボットローバーR1が荷物コンテナからソーラーパネルの部品を取り出し、目的地へ移動、模擬月面上でソーラーパネルを組み立てる一連の作業を実施、全ての作業に成功した。
3.月面資源採取試験
NASA/米国民間宇宙企業は月面における資源探査に強い関心を持っていることを受け、本実証実験においても模擬月面上で砂を採取するための一連の作業を実施した。
具体的には、GITAI月面作業用ロボットローバーR1が荷物コンテナから資源採取用のツールを取り出し、目的地へ移動、模擬月面上の砂を採取・格納、荷物コンテナに格納する一連の作業を実施し、全ての作業に成功した。
4.斜面(砂丘)走破試験
GITAI月面作業用ロボットローバーR1が模擬月面上の傾斜15度~20度の砂丘を登頂可能な走行性能があることを確認した。
GITAIは「今後更なる汎用作業性能向上・月面環境対策を進め、2020年代半ばの月面実証を目指す」とリリースを通じてコメントしている。
GITAI、トヨタの月面モビリティ「ルナ・クルーザー」向けロボットアームの開発に着手 試作機を公開
国際宇宙ステーション(ISS)で宇宙用自律ロボットが作業成功! 宇宙ロボットのスタートアップGITAI Japanが発表
GITAI関連記事
GITAI Japan株式会社