







株式会社人機一体は、西日本旅客鉄道株式会社、日本信号株式会社と合同で、PF06空間重作業人機社会実装プラットフォームにおいて、高所重作業対応汎用人型重機「空間重作業人機」開発プロジェクトを推進しており、3月12まで開催されていた2022国際ロボット展にて、空間重作業人機社会実装プラットフォームの成果として、空間重作業人機の実用レベル(機能と定量的性能の両方を追求し、製品化に向けて段階的仕様達成を目指した)試作機:「零式人機 ver.2.0」「人機操作機 ver.5.0」を初公開した。(関連記事「人機一体が汎用ヒト型重機と高所作業車が連携したド迫力のデモを公開 「零式人機ver2.0」JR西日本と日本信号が開発連携」)
「人機プラットフォーム」を運営し、先端ロボット工学技術を広く社会に実装することにより、人の危険作業や重労働の機械化を進める人機一体と、中期経営計画2022で「メンテナンスのシステムチェンジ」を掲げ、安全な鉄道・交通サービスの持続的な提供に向けて新しいメンテナンス手法への転換に挑戦しているJR西日本グループ、また、鉄道の安全性のさらなる向上、工事・オペレーション・メンテナンスの効率化およびシステムの全体最適化を図ることを目指す日本信号の3社が連携することで、人機一体の保有する先端ロボット工学技術、日本信号のメカトロニクス技術と製品化技術、そしてJR西日本グループが抱えるメンテナンス課題のそれぞれが結びつき、社会課題の解決と新規ビジネスの獲得が期待される。
PF06 空間重作業人機社会実装プラットフォーム
空間重作業人機社会実装プラットフォームとは、人機一体が運営する人機プラットフォームの中で、高所での重作業を機械化することを目的として組成されたものだ。人機社独自の力制御技術およびパワー増幅バイラテラル制御技術により、人間は安全な場所でロボットを操縦し、高所重作業の機械化を実現することができる。このプラットフォームにJR 西日本がユーザ企業、日本信号が活用企業として参画しており、2021年4月202から3社での連携が本格始動。これまで「自動化」は不可能と思われてきた高所作業の「機械化」を実現し、高所重作業対応汎用ロボットという新たなビジネスを開拓している。
開発の経緯


【動画あり】汎用人型重機「零式人機 ver.1.0」を初公開 「空間重作業人機」開発プロジェクト始動!JR西日本×日本信号×人機一体
JR西日本×日本信号×人機一体 人機プラットフォームを活用した「零式人機」など「ロボテス EXPO 2021」で巨大ロボット多数展示
製品としての空間重作業人機は、単一の試作機(例えば零式人機 ver.1.1)の延長線上に実現されるものでなく、多様なベクトル(各開発要素それぞれの方向性)を合成することにより革新的な製品は生み出されるものであり、それらをシリアルにではなくパラレルに(並行して)開発を進めることにより開発期間を短縮し、製品化を早期に実現することができる。
この考え方に基づき、サイズ、重量など製品としての定量的性能を追求し、かつ零式人機 ver.1.1に実装されていない緩急剛柔自在な力制御を実現する人機一体の独自技術(PBAC)を搭載した、零式人機ver.1.1とは異なるベクトルで表現される実用レベル試作機=零式人機ver.2.0を開発。さらに空間重作業人機の社会実装を見据えて、空間重作業人機を高所に移動させるための車両(例:高所作業車、軌陸両用車)、およびそれらに搭載して一体運用が可能なコンパクトな人機操作機ver.5.0を開発することとした。
■【動画】20220312_091801 + JINKI type Zero ver.2.0 + iREX 2022 Demo
今回公開されたロボットについて
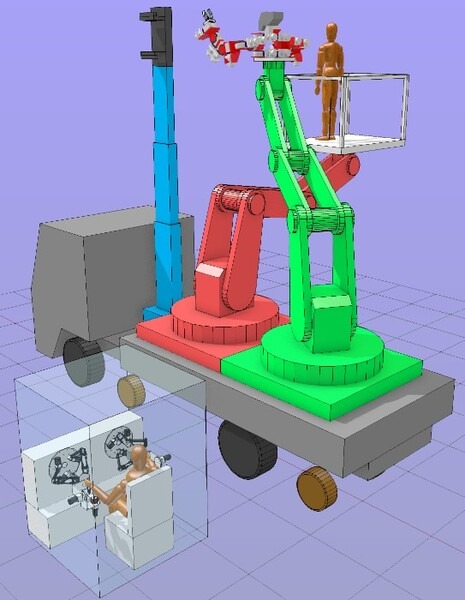
今回初公開されたロボットは、零式人機 ver.2.0(高所作業車のブーム先端に取り付け、高所にて作業するロボット)、人機操作機 ver.5.0(高所作業車のコックピットに設置された、零式人機ver.2.0を操作するロボット)、および専用高所作業車にて構成された。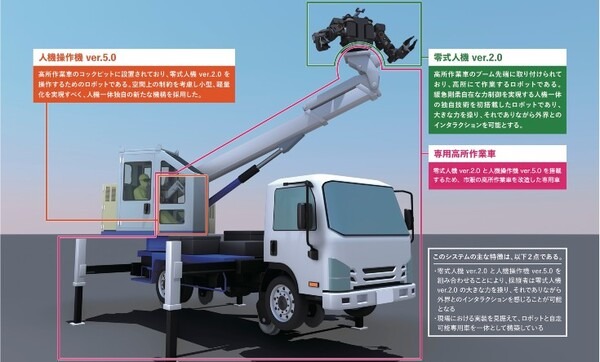
全体構成
同システムの主な特徴は、以下の2点だ。
● 現場における実装を見据えて、ロボットと自走可能な専用高所作業車を一体として構築している。
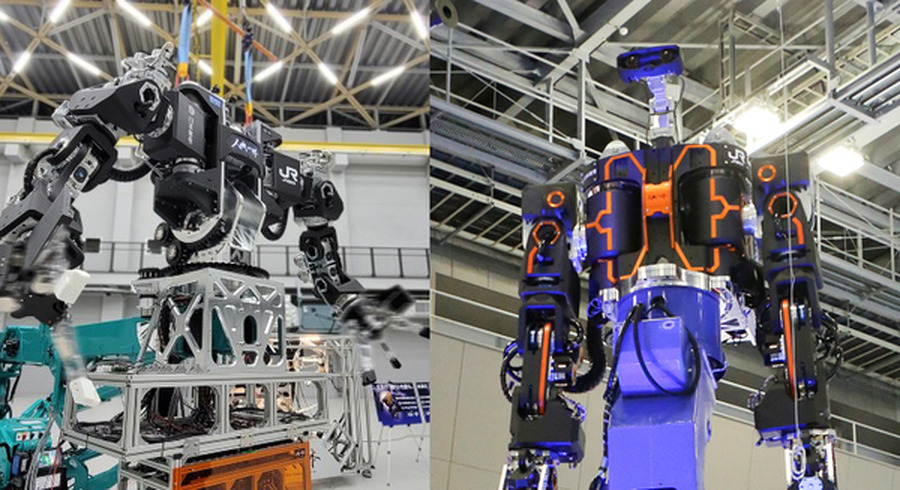
零式人機ver.2.0
零式人機 ver.2.0 は、緩急剛柔自在な力制御を実現する人機一体の独自技術PBACを(人型としては)初搭載した人型重機であり、大きな力を操り、それでありながら外界とのインタラクションを可能とするロボットだ。さらに現場での制約を考慮したサイズ、重量など定量的性能を追求した、零式人機 ver.1.0 とは異なる開発のベクトルを持つ、空間重作業人機の実用レベル試作機となっている。なお、同機のトータルデザインは、znug designクリエイティブコミュニケーター/デザイナーの根津 孝太氏が手掛けており、空間重作業人機社会実装プラットフォームの意思である未来の「働く」を創ることを具現化したものだ。

「町工場から世界へ」を掲げた電動バイク『zecOO』、やわらかい布製超小型モビリティ『rimOnO』などのプロジェクトを推進する一方、GROOVE X『LOVOT』、トヨタ自動車コンセプトカー『Camatte』『Setsuna』、ダイハツ工業『COPEN』、THEMOS ケータイマグ『JMY』『JNL』『JNR』、Afternoon Tea ランチボックス『LUNCH WARE』、タミヤミニ四駆『Astralster』『RAIKIRI』、などの開発も手がける。
人機操作機 ver.5.0
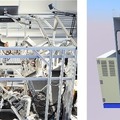
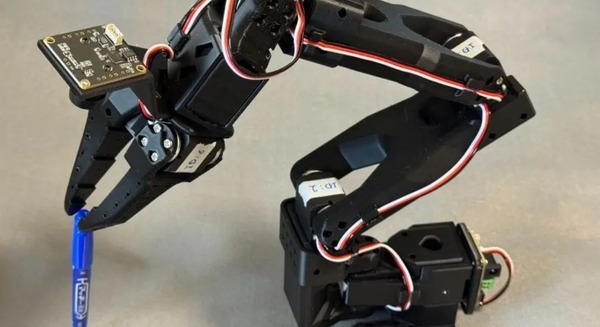
人機操作機 ver.5.0 は、自走可能な専用車に搭載するために、小型、軽量化を実現する人機一体独自の新たな特許機構(パンタグラフ式パラレルリンクロボット)を採用して開発したロボットだ。従来の人機操作機ver.3.2と比較して小型、軽量であり、操作者に繊細・巧緻な感覚を伝達することと、ロボットと高所作業車・軌陸車を一体システムとして構築することとを両立する新たな操作機となっている。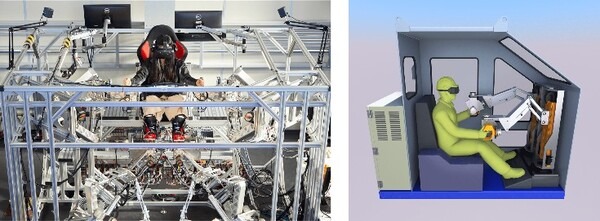
今後の展開
同社は、今回公開した零式人機ver.2.0、人機操作機ver.5.0の開発成果に加えて零式人機ver.1.xの開発成果も活用し、これらのベクトルの合成方向にある製品の早期実現に向けて引き続きJR西日本、日本信号と開発プロジェクトを推進し、その先にある社会課題を解決し、新たなビジネスを開拓するとのことだ。
株式会社人機一体関連記事(ロボスタ)