
日本電信電話株式会社(以下、NTT)は信号機のない街を自動運転車が相互に通信をしながら自律走行し、車同士が衝突せずに全体の移動時間を短縮する未来のモビリティの姿「シグナルフリーモビリティ」の実現に向けた取り組みとして、デジタルツインを介して10-20台の自動運転ミニカーを制御するシステムを構築し、実環境で交通をリアルタイムに全体最適制御する実験に成功したことを発表した。今後、交通制御実験の規模を拡大し、より実世界の交通に近い状況の実証実験を展開していくことで、IOWNの実現を推進していく。
なお、今回の成果は6月2日から開催されるNTTコミュニケーション科学基礎研究所オープンハウス2022の講演や展示を通じて紹介予定。
1.研究の背景
将来、ICTの高度化により、ヒト・クルマ・インフラが高度に協調し、安全かつ効率な移動を提供する高度協調型モビリティ社会の実現が期待されている。IOWNにより究極に高度化されたICTがもたらすモビリティ社会のコンセプトとして、信号機のない街を自動運転車群が相互に通信をしながら自律走行し、衝突することなく輸送時間を短縮する未来のモビリティの姿、「シグナルフリーモビリティ」を示している(図1)。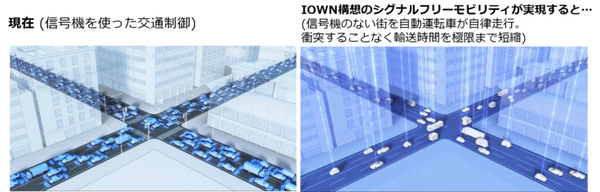
IOWN(Innovative Optical and Wireless Network)構想とは、革新的な技術によりこれまでのインフラの限界を超え、あらゆる情報を基に個と全体との最適化を図り、多様性を受容できる豊かな社会を創るため、光を中心とした革新的技術を活用した高速大容量通信、膨大な計算リソース等を提供可能な端末を含むネットワーク・情報処理基盤の構想。これまでの情報通信システムを変革し、現状のICT技術の限界を超えた新たな情報通信基盤の実現をめざしてる。2024年の仕様確定、2030年の実現をめざして、研究開発を始めている。
IOWNってなに?
https://www.rd.ntt/iown/whats.html
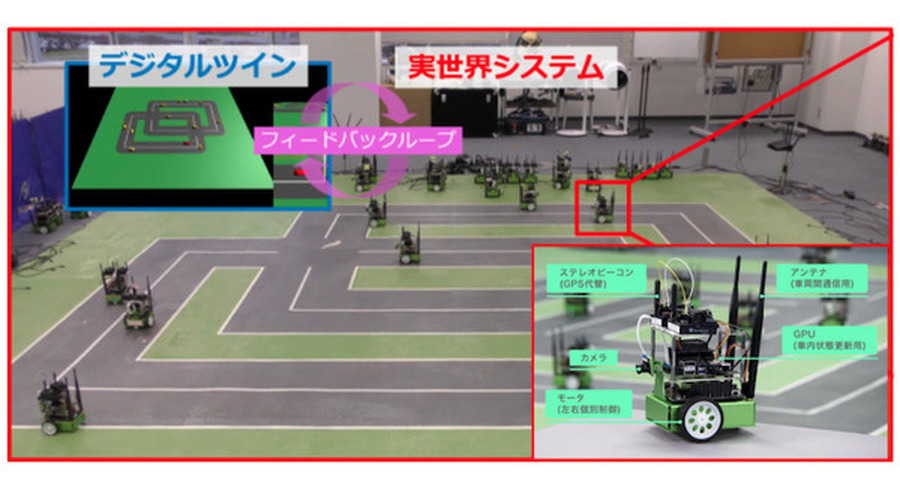
NTTはこれまでに、シグナルフリーモビリティにおける車の状態予測のための分散演算則と交通制御の数値シミュレーションの結果を示してきた。今回は新たにデジタルツインを介して、10-20台の自動運転ミニカーをリアルタイムに制御するシステムを構築し、実環境で交通をリアルタイムに全体最適制御する実験に成功したことで、IOWNのめざすシグナルフリーモビリティ実現に向けて大きく進展した。
Mobility by IOWN(コンセプトビデオ)
2.「分散深層学習技術」の特徴
シグナルフリーモビリティでは車群から収集したデータをデジタルツインで解析し、衝突することなく輸送時間を短縮するための交通全体の最適状態(各車の速度や位置)を予測して制御する。このデジタルツイン上の状態予測系のモデル化、及びデータ駆動型でそのモデル学習する方式を確立することが研究課題のメイン。
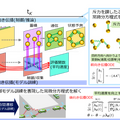
同研究では図2が示すように、各車(ノード、黄色の頂点で表示)とそのつながり(エッジ、緑色の辺で表示)で構成されるグラフを用いて、デジタルツインの状態予測系をモデル化した。時々刻々と変化する複雑な交通制御を単純な部品(各車の状態予測/制御と近接車間の通信)の組み合わせで表現することがその狙い。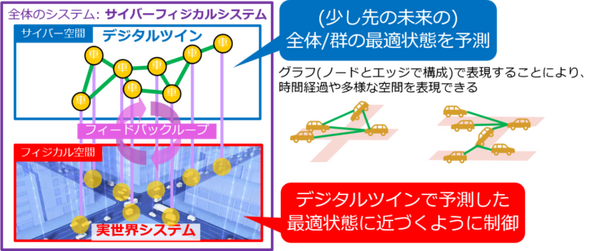
2.1 デジタルツインにおける状態予測演算
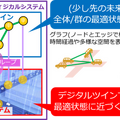
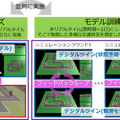
以下の図3には実世界システムとデジタルツインが相互にフィードバックしながら、車群の最適状態(速度や位置)の予測と制御を時系列的に発展させるイメージが描かれている。デジタルツイン上では実世界で収集されたデータ(周囲状況を模した画像データ等)を蓄積し、一定以上の車間距離を保つように斥力を課すための情報を計算して近接車間の通信を介して交換される。その情報を使って衝突せずに目的地点に近づくための各車の状態を予測する。
この一連の処理(前向き伝播)は各車で実施可能な分散型の演算と近接した車間の通信を繰り返すことで実施できるように設計されている。演算や通信といった処理が分散化されたネットワーク負荷の少ないIoT機器群の協調制御を体現した。さらに、状態予測系に含まれる学習可能なパラメータを最適化することで、平均速度を向上させるような効率的な交通制御モデルを学習できる(後向き伝播)。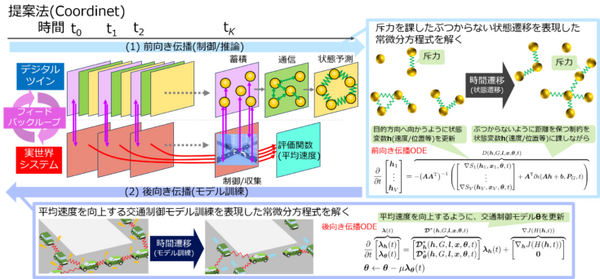
なお、この2種類のフロー(前向き伝播、後向き伝播)は常微分方程式(ODE)で表現されていて、それを各車の演算や近接車間の通信によって実施できるように分散化することで特殊なニューラルネットワーク(CoordiNet)として定義し、デジタルツインの演算を具体化した。
2.2 シグナルフリーモビリティのシステム構築
提案方式(CoordiNet)を使って実装したシグナルフリーモビリティのシステムは、図4に示すように予測/制御フェーズとモデル訓練フェーズの2つで構成される。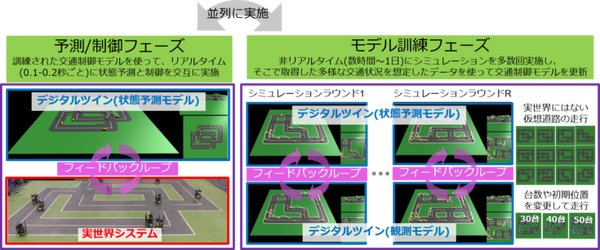
モデル訓練フェーズではデジタルツイン上で多様な交通状況を想定したシミュレーションを多数回実施し、交通制御モデルを最適化する。実世界にある道路だけでなく、仮想空間上に構築した道路に車の台数や初期位置を変えて配置してシミュレーションを行うことで、多様な交通状況を模したデータ収集を可能にする。このデータを使って交通制御モデルを学習することにより、多様な交通状況でも衝突せずに効率良く走行することが期待される。このモデル訓練フェーズは膨大な計算量を必要とするため、非リアルタイム(数時間~1日)に行われる。
一方、予測/制御フェーズでは、学習済の交通制御モデルを使って、デジタルツインとフィードバックしながら実世界の交通を制御する。構築したシステムでは、リアルタイム(おおよそ0.1-0.2秒ごと)に各車の状態予測と制御が行われた。
2.3 実験結果
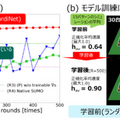
モデル訓練フェーズ(図4右)における実験結果の一部を図5に示す。提案方式(CoordiNet)では、シミュレーションを繰り返すとともに安定して平均速度が向上した。最大値が1.0になるように速度を正規化した評価実験で、ランダムに初期化した学習前の時点では0.64であったのに対して、学習後には0.90まで向上した。これは、シミュレーションを介したデータ収集により、交通制御モデルの学習を効率的に進めることができた恩恵だと考えられる。
一方、状態遷移に斥力を課さない一般的なニューラルネットワークや交通シミュレーター(SUMO)を比較方式として性能を調査した。学習可能な方式については提案法と同様にシミュレーションを介して学習した。例えばグラフニューラルネットワークの一種であるGATを用いた場合、車が衝突してしまったり、平均速度が安定して向上しなかった。また、交通シミュレータ(SUMO)を用いた場合は、衝突することはなかったものの、交差点手前で停滞する状況が頻繁に起きてしまい、提案方式ほどの平均速度は得られなかった。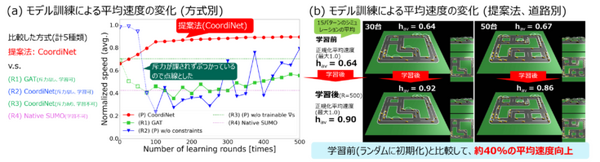
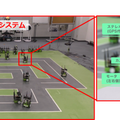
学習後の交通制御モデルを使って、予測/制御フェーズ(図4左)を実施するためのシステムを構築した。図6に示すように各自動運転ミニカーには、位置情報を計測するためのビーコン、計算するためのGPU、Wi-Fi通信モジュール、左右独立に制御可能なモーターが搭載されている。Wi-Fiを介してサーバーや他の車と通信し、衝突せずに全体の輸送時間を短縮する状態をデジタルツインで予測し、10-20台の自動運転ミニカーをリアルタイム(おおよそ0.1-0.2秒ごと)に制御することができた。これによりデジタルツインで予測された状態のように、現実世界で衝突することなく、スムーズに走行している様子を実験的に確認した。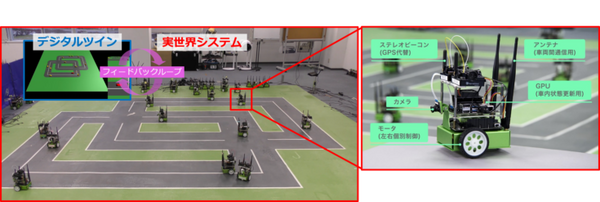
3.今後の展開
デジタルツインを介して10-20台の自動運転ミニカーを制御するシステムを構築し、実世界で全体最適制御を行う実験に成功した。今後、この交通制御実験の規模を拡大し、より実世界の交通に近い状況の実証実験を展開していく予定。IOWNにおけるデジタルツインコンピューティングを支える分散情報処理技術として、今後も研究開発を推進していく。