

自社開発の産業用水中ドローン「DiveUnit300」を軸に日常使いできる水中アクセス手段の提供をする筑波大学発のスタートアップ、株式会社FullDepthは、日本電信電話株式会社(以下、NTT)、株式会社NTTドコモ、NTTコミュニケーションズ株式会社が行った共同実験「世界初、海中音響通信技術を用いた完全遠隔無線制御型水中ドローンの実現」に技術協力したことを発表した。
海中音響通信技術で水中ドローンを無線操作
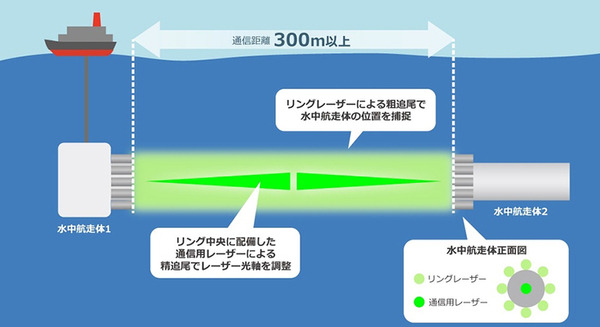
今回の実験はNTTが独自に研究開発した海中音響通信の高速化を実現する時空間等化技術(※1)と安定化を実現する環境雑音耐性向上技術(※2)を用いて、世界で初めて浅海域における伝送速度1Mbps/300mに達し、既存技術の10倍の伝送速度となる無線伝送実験に成功した。
海面や海底で反射する海面反射波の一部を複数の受波器を用いるアレー技術にて空間領域で抑圧することで、海面反射波による通信品質劣化を抑圧する技術。
※2 環境雑音耐性向上技術
水深数十m程度の浅海域エリアにおいて高頻度で観測される、テッポウエビが発生する破裂音や船の航走音、湾岸設備に用いる重機の作業音などの環境雑音が引き起こす特性劣化を抑圧する技術。
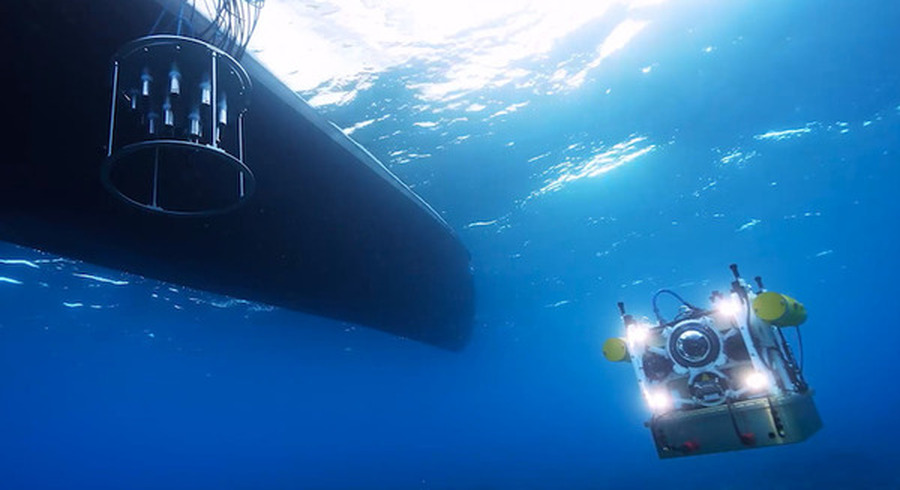
FullDepthはNTTが開発した海中音響通信の特性に合わせた水中ドローンの制御システム構築を担当し、水中ドローン「DiveUnit300」を使用し、同技術に対応した世界初「完全遠隔無線制御型水中ドローン」を実現した。
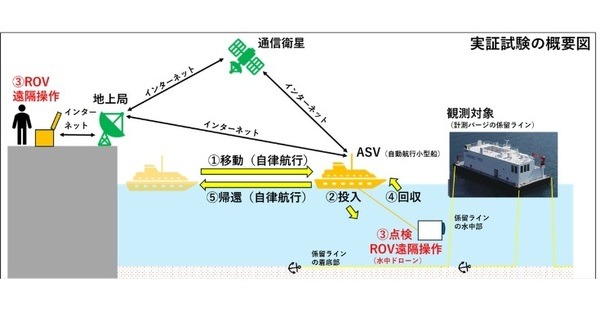
「完全遠隔無線制御型の水中ドローン」は海上(船上)から水中ドローンの映像を確認しながらコントローラーで操作することが可能。海上にある音響通信装置が水中ドローンに対して制御信号を送信し、水中ドローンは制御信号に従い水中を移動・撮影を行い、撮影した映像のストリーミングデータを海上にある音響通信装置へ送信する。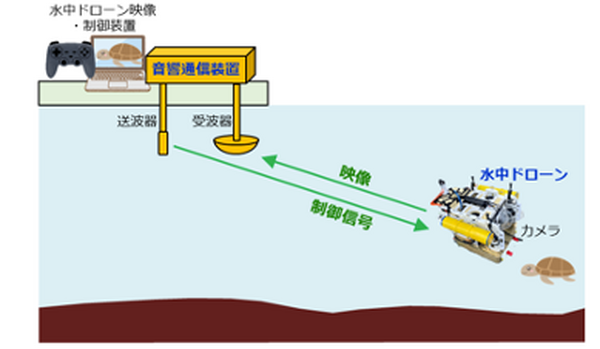
「完全遠隔無線制御型の水中ドローン」は従来の有線制御型の水中ドローンでは潜航が困難な構造物が入り組んだ狭いエリアや、海洋再生エネルギーで注目が高まっている洋上風力発電のメンテナンスでも海上から水中映像を確認しながら水中ドローンを遠隔操作することが可能となり、水中ドローンを使用した海中設備点検などの作業性向上や効率化が期待できる。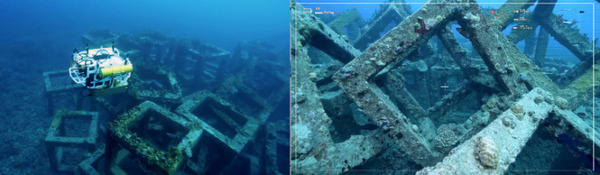
株式会社FullDepth