



NVIDIAはCES 2023にて、ロボティクスシミュレーションツールであるIsaac Simの大幅なアップデートを発表した。最新バージョンは製造および物流ロボットのユースケースのパフォーマンスと機能の改善に重点を置いている。これにより、開発者や研究者はインテリジェントなロボットのトレーニングと展開を加速させるデジタルツインを作成できるようになる。
人や複雑なコンベアシステムのシミュレーション環境をサポート
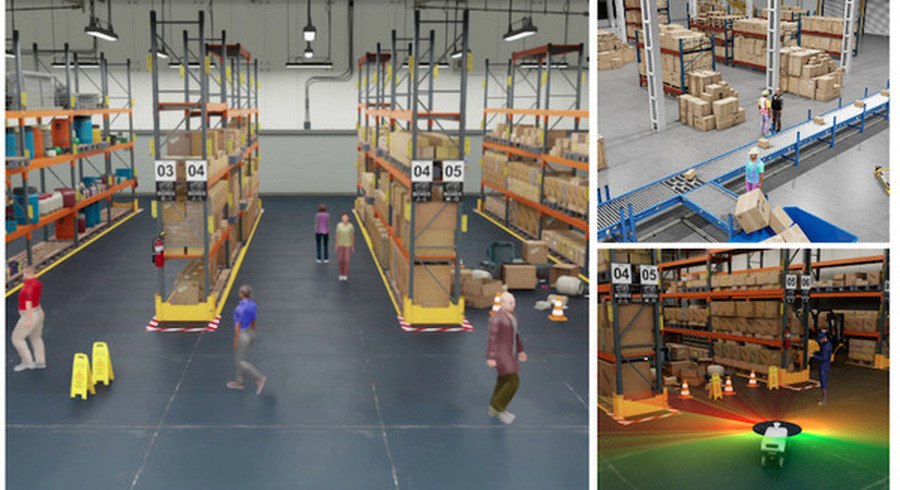
人間と協働ロボット、自律搬送ロボットの並行作業がますます増えるなか、人間とその一般的な行動をシミュレーションに追加することが重要になっている。Isaac Simの新しい人間シミュレーション機能により、人間のキャラクターを倉庫や工場に追加し、荷物を積み重ねたり、カートを押したりするなど、よくある動作を実行する作業を課すことができる。最も一般的な動作の多くは既にサポートされているため、コマンドを送るだけで簡単にシミュレートできる。
また、シミュレーションの世界で確認された結果と現実の世界で見られる結果の違いを最小限に抑えるには、物理的に正確なセンサーモデルが不可欠。NVIDIA RTX テクノロジを使用して、Isaac Simはセンサーからの物理的に正確なデータをリアルタイムにレンダリングできるようになった。RTXでシミュレートされたLiDARの場合、レイトレーシングはさまざまな照明条件の下で、または反射素材に応じて、より正確なセンサーデータを提供する。
Isaac Simは物理的に正確なシミュレーション環境を構築するために不可欠な、シミュレーションに対応した新しい3Dアセットも多数提供している。倉庫の部品から良く使われるロボットまで、すべてがすでに使える状態になっているので、開発者とユーザーはすぐに構築を開始できる。
ロボティクス研究者にとって重要な新機能には、強化学習用のIsaac Gymや共同ロボットプログラミング用のIsaac Cortexのアップデートが含まれる。さらに、新しいツールであるIsaac ORBITは、ロボットの学習と動作計画のためのシミュレーション動作環境とベンチマークを提供する。
また、ロボットオペレーティングシステム(ROS)開発者の大規模なコミュニティのために、Isaac SimはROS 2 HumbleとWindowsのサポートをアップグレードする。すべてのIsaac ROSソフトウェアをシミュレーションで使用できるようになった。
NVIDIA Isaac Sim 2022.2 リリースのハイライト
以下は最新のリリースで追加された主要な機能
倉庫物流
倉庫のロジスティクスはロボットのイノベーションの最も重要な分野の1つ。NVIDIA Isaac Simには倉庫でのロボット シミュレーションのニーズに対応するツールがいくつかある。以前、倉庫のデジタルツインを生成するツールがリリースされた。現在、NVIDIA Isaac Simにはリアルなコンベアベルトを構築するためのツールが含まれている。また、倉庫環境にデジタルヒューマンを追加するためのピープルシミュレーターも含まれている。このツールは人間の近くで作業するロボットの認識および安全システムを検証するのに役立つ。
製造業
製造環境ではプロセスを自動化するためにマニピュレーターロボットが長い間採用されてきた。2022.2リリースには、マニピュレーターロボットのモーションコントロールを処理するためのいくつかの新機能がある。NVIDIA Isaac Simの更新されたモーション生成拡張機能により、モーションコントロールアルゴリズムの統合とベンチマークが簡素化された。組み込まれているアルゴリズムRMPFlowは、インテリジェントな衝突回避により、ロボットの滑らかな軌跡を作成する。
パフォーマンスの向上に加えて、このリリースでは、Lula ロボット記述ファイル用のグラフィック エディターなど、多くの使いやすさが改善されている。マニピュレータの新しいセットも追加された。
フリートの最適化
cuOpt for Isaac Sim拡張機能は、NVIDIA Isaac Simと直接統合されたNVIDIA cuOptエンジンの展開。NVIDIA cuOptは複雑なリアルタイムのフリートルーティングの作成を支援するオペレーションリサーチ最適化API。これらのAPIを使用して、複数の制約がある複雑なルーティングの問題を解決し、1秒未満のソルバー応答時間を使用しながら、動的な再ルーティング、ジョブスケジューリング、ロボットによるルート計画などの新しい機能を提供できる。
ROSサポートの改善
ROSサポートがアップグレードされ、ROS 2 Humbleがサポートされるようになった。同じくHumbleリリースに基づくIsaac ROSは、このリリースで簡単にシミュレートおよびテストできるようになった。ROS 2のサポートもWindowsマシンに追加されている。
研究ツール
ロボティクス研究者向けの重要な新機能には、Isaac Gym(強化学習)のパフォーマンスの向上が含まれる。協働ロボットプログラミングのIsaac Cortexには、新しい例がある。最後に、新しいオープンソース ツールIsaac ORBITは、ロボットの学習と動作計画のためのシミュレーション動作環境とベンチマークを提供する。
【動画】NVIDIA Isaac Sim – Powering Robotics Development