








ブリヂストンのソフトロボティクス事業の社内ベンチャー「ソフトロボティクス ベンチャーズ」は、人工筋肉(ラバーアクチュエーター)を開発した。そして、それを活用したソフトロボットハンドを2023年2月1日に同社が報道関係者向けに開催した「Bridgestone Softrobotics Day」で公開した。

東京小平で開催された「Bridgestone Innovation Park」の会場入口では、この日お披露目となるロボットハンドを搭載したアームロボットが報道陣を迎えてくれた。ロボットはひとりひとりにボトルウォーターを手渡し、来場者と握手をした。ゴム製のロボットハンドは柔らかく、どこか温かみを感じるものだった。
■会場入口でソフトロボットがボトルウォーターを進呈する様子
ロボットには最も難しい「ピッキング作業」に挑戦
ブリヂストンは昨年8月に「2030年長期アスピレーション」を発表し、その中で2024年1月にソフトロボティクスを事業化を明記した。その後、展示会でソフトロボティクスを参考出品したしたところ、物流業界を中心に大きな反響があり、早期に事業化したいという手ごたえを感じたという。
「今日来場してくれたメディアの方々を含め、多くのパートナー企業と共創し、ソフトロボティクスを新しい形で世の中に浸透させたい。そして今日は、報道関係者の皆さんには”ソフトロボティクスと言えばブリヂストン”、と覚えて帰って欲しい」と力強く語った。
ブリヂストンがソフトロボティクスでまず実用化を目指すのは、物流分野での「ピッキング作業」。現在、物流分野では注文のあった商品を棚ごと運んできたり、自律移動で荷物を運搬したり、荷入れした商品を仕分けして運んだり、と、移動や搬送の支援に多く利用されはじめている。そして、最もロボット化が困難な作業のひとつとしてピッキングが挙げられる。それは、多くの商品が混在する物流現場で、商品を認識して、商品ごとに予め決められた最適な場所を持ってピックアップし、商品ごとに予め決められた最適な場所に最適な方法で置く、という作業は、人間が持つ認識能力や、柔らかい物をやさしく持つなどの加減、商品を潰さないように考慮して積んだり重ねる気配りなど、人間ならでは自然にできてきた多くの要素が求められるためだ。

そして、その最も難しいとされるピッキング作業にブリヂストンは挑もうとしている。実現するためには柔らかいロボットハンドとその特性が、更に「目」と「頭脳」となって人間のように判断するAI技術が必要となる。後者の目と頭脳は開発をアセントロボティクスが担当する。
6つの家庭用品をカメラで識別して持ち方/置き方を配慮
今回のデモでもアセントロボティクスのソフト基盤を活用している。最初のデモでは無造作に置かれた6つの家庭用品をカメラで認識し、ロボットがひとつずつ把持して棚に順序よく正しい向きで並べていった。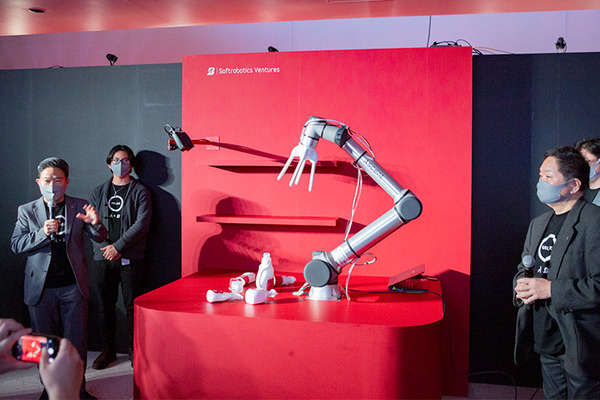
家庭用品を並べると今回のキーワードである「UNLOCK」の文字が見えた(久夛良木氏によれば「UNLOCKは未来の扉を開くことを意味している」という)。
■デモ1.家庭用品をカメラで識別し、ソフトロボットハンドで棚に並べる
棚から指定の製品をピックアップして箱詰め
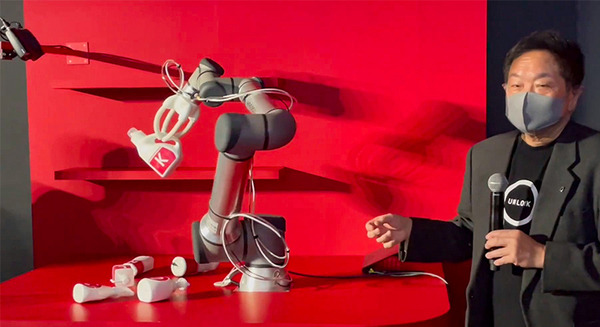
もうひとつのデモは、棚から指定の製品をピックアップして、箱に入れるというもので、物流現場等で注文内容に合わせて箱詰めするシーンに似たものだ。大型のEC物流倉庫やマテハン分野では最近、商品を棚ごとロボットが運んできて、パソコン画面で指定された商品を人間のスタッフがピックアップして発送向けの箱にまとめるという光景が現場で見られるようになったきた。それは前述のように搬送作業はロボットに適しているが、ピックアップに関してはロボットより人間が優れていることためだ。その部分、言わば最後に残されている自動化の壁「ピッキング作業」をソフトロボットで行うデモとなっていた。
■デモ2.棚に並んだ商品から指定のものをピックアップして梱包箱に入れる
音山氏はソフトロボティクスの特長のひとつとして「いい加減」(良い加減)に持てることを強調した。これはピッキングには非常に重要な要素で、しっかりと把持することを前提に、多少、持つ位置がズレたりロボットの指を置く位置が変わったとしてもきちんと持ち続けられることを示す意味も含まれている。
■ソフトロボティクスの特長
今回のデモは、カメラだけで物体認識や把持や置く作業を行なったが、ロボットハンド自体には手のひらの中央位置にスリットがあり、そこにデプスセンサーを搭載しているため、それを使っても距離を測ることができる。

センサーを使用する場合は、緑色の光を発光して距離を測る
デジタルツインが鍵
動画でも確認できるが、久夛良木氏は機械学習のトレーニングに関して「デジタルツイン」を引き合いに出した。360度画像やCADデータから商品を学習すれば、その方向から見ても商品を判別できる。新しい商品が出てきたときも、デジタルツインの仮想空間に商品を追加することで、ロボットが形状を学習して把持することが可能になる、とした。
ソフトロボティクスの要、人工筋肉「ラバーアクチュエーター」
ブリヂストンが同社の強みとする人工筋肉「ラバーアクチュエーター」は、柔らかいロボットハンドの指の中に組み込まれている。ゴムチューブと繊維で構成されていて、いわゆる空圧式だ(油圧式も可能)。コンプレッサやポンプをロボットアームや土台に組み込んでおき、そこからチューブを通して空気を「ラバーアクチュエーター」に送り込んで人の筋肉のように伸縮させ、それを制御することで力具合もコントロールする。

動画にもあるように、アクチュエータ自体はとても軽量で高出力、アクチュエータはバナナ一本の重さで、約30kgの米俵を持ち上げることも可能だという。
■ラバーアクチュエーターの特長
今回のデモの場合、四本の各指にラバーアクチュエーターが入っているものの、1本のチューブ(クリアチューブ)によって制御されていることがわかる。すなわち、4本の指は独立に動くのではなく、簡単に言うとパーかグーか、その中間(握る)の度合いを4本の指に対して行っている。もしも、4本の指を独立して制御したい場合は、クリアチューブが各指に接続される構成となる。
自由度が高い将来のロボットハンドを展示
会場では、将来のロボットハンドが展示されていたが、これを見ると解りやすいのだが、各指に2本ずつのクリアチューブが接続され、更には横軸の幹にあたるアクチュエータにもクリアチューブが接続されている。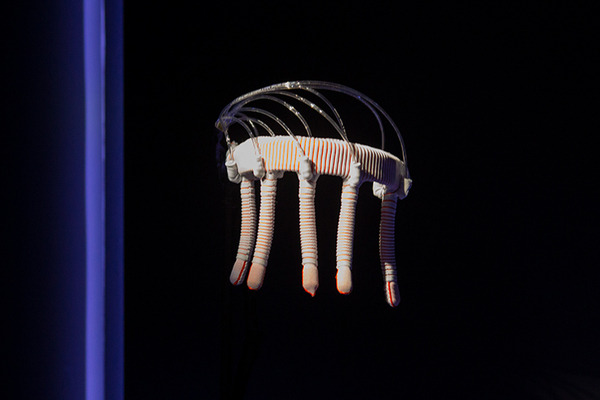
このような構成にすることで、横軸のアクチュエータを制御するとともに、各指の2本ずつのチューブによって、指を握る側と、逆に反る側にも制御が可能になっている。人間の指を真似るだけでなく、「ラバーアクチュエーター」が構成を工夫することで自由度が高いものを創ることができる拡張性を示した展示となっていた。
■ブリヂストンの人工筋肉「ラバーアクチュエーター」の将来像









