シャープや東芝インフラシステムズ、ヤンマーアグリ、名古屋テレビら9者は共同で、同年11月から2023年2月の約3カ月にわたって、ローカル5Gを活用した放牧地管理の実証実験を北海道で行なったことを発表した。
実験の具体的な内容は、「ローカル5Gを介した無人ロボットトラクターの遠隔操作による、軽種馬用放牧地の管理作業の省人化に向けた課題実証」、および「広大な放牧地での分散アンテナによるローカル5Gエリアの柔軟な構築に向けた技術実証」から構成される。自動運転トラクターやその遠隔操作、ドローン、ローカル5G、高精細映像、分散アンテナなどの実用性を確認した。
9者でローカル5Gを活用したスマート農業
シャープ株式会社、有限会社ビッグレッドファーム、北海道新冠町、東芝インフラシステムズ株式会社、エクシオグループ株式会社、株式会社調和技研、ヤンマーアグリ株式会社、名古屋テレビ放送株式会社、株式会社道銀地域総合研究所の9者は、2022年8月に採択を受けた総務省の開発実証事業として、同年11月から2023年2月の約3カ月にわたり、ビッグレッドファーム明和(北海道新冠郡新冠町)にてローカル5Gを活用した放牧地管理の実証実験を行なった。
ローカル5Gを介した無人ロボットトラクターの遠隔操作による、軽種馬用放牧地の管理作業の省人化に向けた課題実証
軽種馬の育成、体調管理においては、安全かつ適切な運動・摂食が可能な放牧地の管理が重要。春から秋にかけては牧草の生育が著しく、猛暑など過酷な天候下にあっても毎日のようにトラクターによる草刈り作業が必要となる。また、冬季には降雪のたびに除雪を行う必要があることから、年間を通じて長時間労働の要因となっている。
この実証実験では、予め設定したルートを自動で走行するロボットトラクターに4Kカメラを搭載し、その作業領域の様子を高精細映像としてローカル5Gで伝送。基地局設備を搭載した自動車内で受信・確認するシステムを構築しました。これにより、トラクターに乗車することなく放牧地の草刈りや除雪が可能。また、ロボットトラクターに制御信号も伝送することから、緊急停止や再発進の遠隔操作も可能となった。
さらに、牧草の生育が芳しくないエリアを作業対象から除外するなど、より効率的な草刈りを実現するため、ドローンとAIを用いたロボットトラクターの操作の検証も実施。作業前にドローンで撮影した放牧地の状況をもとに、AI解析により最適な作業経路を設計し、トラクターに伝送することで、より精度の高い作業の実現を検証している。
これらにより、牧草地管理作業の省人化と、牧場経営の効率化が期待できる。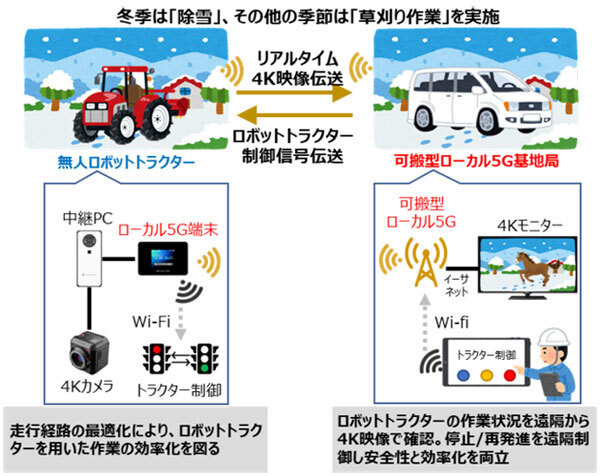
広大な放牧地での分散アンテナによるローカル5Gエリアの柔軟な構築に向けた技術実証
実証実験が行われた場所は、建造物などがほとんどない広大な放牧地。電波の反射が起きにくい環境といえる。一方、ローカル5Gの電波は直進性が高い高周波数であることから、このような場所に障害物が現れると、電波が遮断されてしまい、映像伝送における映像瞬断の発生等が想定される。
その対策として、この実証実験では、一つのアンテナとの通信が遮断されても、別のアンテナが通信を維持する分散アンテナシステム(DAS: Distributed Antenna System)を採用。広大かつ反射物の少ない環境でも安定したローカル5G通信を構築できることを検証した。
また、可搬型の基地局設備を必要に応じ移動して運用できることから、より低いコストで柔軟に複数のローカル5Gエリアを構築できることも検証している。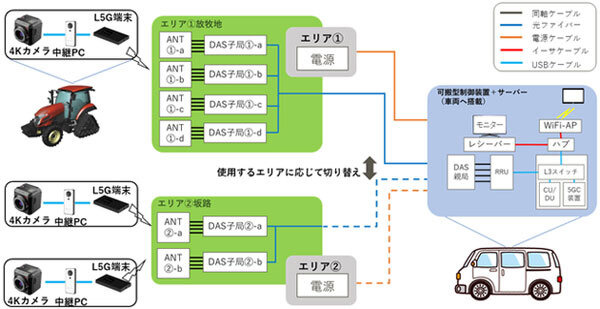
今後の展開
今後、参加各者は、本実証実験での技術蓄積をもとに、広大な農用地や牧草地での効率的なローカル5Gエリア構築による作業の省人化や、高精細映像伝送を用いた顧客ニーズへの対応などを図っていく。また、他分野への展開も積極的に進め、ローカル5Gによる地域産業の発展に貢献したい考えだ。
各者の役割(担当分野)
シャープ(代表研究者)
全体取り纏め、ローカル5G関連設備・システム検討、技術開発、評価、他地域への横展開
ビッグレッドファーム
実証場所の提供、実施作業の技術支援・評価
北海道新冠町
普及施策、他事業・施策との連動展開
東芝インフラシステムズ
分散アンテナに関するシステム・エリア構築支援
エクシオグループ
ケーブル等設置、実証測定、報告書作成
調和技研
ドローンカメラとAIを用いた画像認識・経路最適化機能の開発
ヤンマーアグリ
ロボットトラクターの自走制御システム開発、放牧地走行テスト実施
名古屋テレビ放送
実証実験記録、映像作成
道銀地域総合研究所
課題実証における横展開案の検討、道内横展開検討委員会の運営