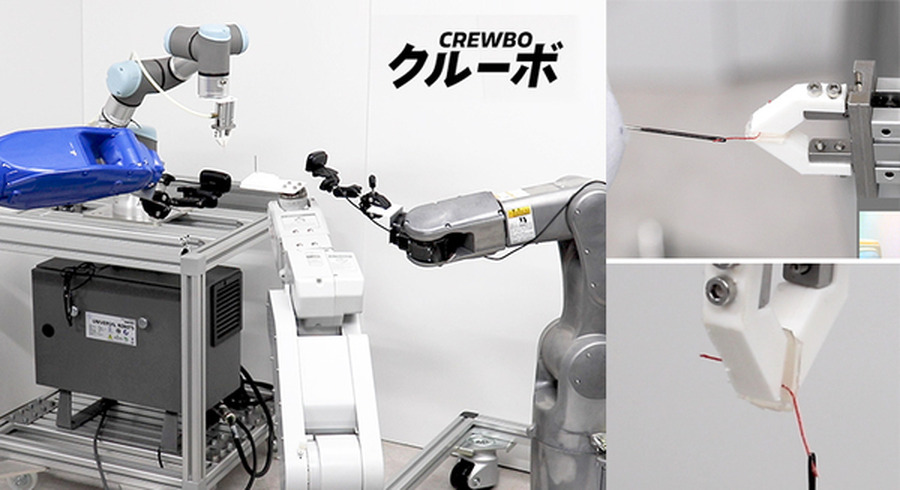








株式会社チトセロボティクスは、ロボット制御ソフトウェア「クルーボ」を使って、ビジュアルフィードバック制御を実装したロボットが、針の穴に糸を通す極めて精密な作業を複数台のロボットが協働して作業することを実現し、その動画を公開した。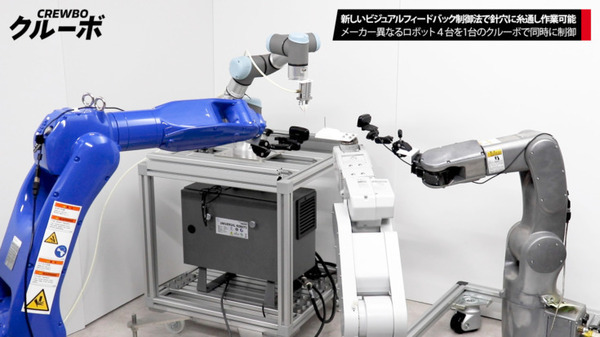
動画では、協働型ロボットを含む4台のメーカーが異なるロボットアームを協調制御することで、視覚の切り替えと複雑な作業の自動化を達成している。
この提案方法では、4台のロボット設置の位置や姿勢をキャリブレーションする必要はなく、現移動台車または移動ロボットに搭載したロボットを容易にセッティングすることが可能だという。
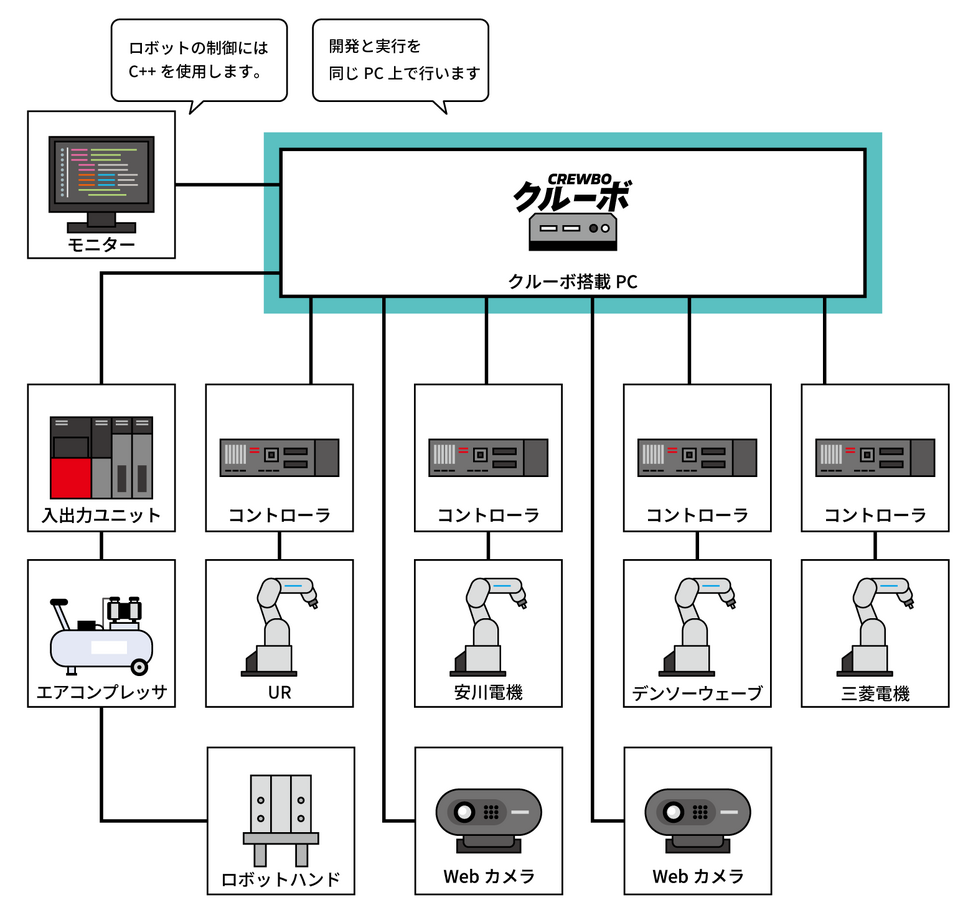
さらに、「クルーボ」を使用したロボットシステムは、複数メーカの異なるロボットアームを同じコンピュータに接続し、同時に制御することができる。これにより、 メーカー混在の協調作業においても、シームレスな多腕制御が可能 となった。
この動画では、ロボット制御ソフトウェア「クルーボ」に接続されたユニバーサルロボット、三菱電機、デンソーウェーブ、安川電機の、4社のメーカーの異なるロボットアームを用いて、協働型ロボットが針の穴に糸を通す様子が確認できる。
■動画
これらの特徴は、自動化効率を飛躍的に向上させ、製造現場の未来に新たな可能性をもたらすとしている。
動画から見るロボット協調と精細な制御技術
動画冒頭では、3台の産業用ロボット(三菱電機、デンソーウェーブ、安川電機)が、協働型ロボット(ユニバーサルロボット)の前に集結する。このシステムでは、すべてのロボットアームを「クルーボ」によって制御している。2台の産業用ロボットはカメラを持っており、1台の産業用ロボットが針を持っている。そして、協働型ロボットが糸を持っており、針の穴に糸を通す動作を行う。
これらのロボット4台は、移動台車のようなベースに搭載されており、適当に人が運んで配置している。
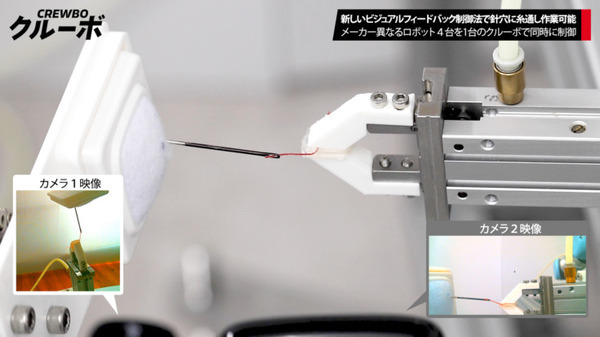
2台のカメラの映像のなかで、針の穴、糸の先端をそれぞれ認識し、協働型ロボットの手先位置姿勢の制御を「クルーボ」が自動的に生成。糸のような柔らかい物体は重力によって垂れ下がったり、ロボットの動作によって振動したりしますが、クルーボのリアルタイムビジュアルフィードバック制御によって、高精度な挿入動作を実現している。

動画後半では、複数台の産業用ロボットアームを協調動作させる多腕制御によって作業環境を変更して再度針の穴に糸を通す。カメラの画角が大きく変わったり、針の位置関係が変わっても、前半と同様に高精度な制御によって作業を完遂する。
システム構成図
クルーボについて
「クルーボ」はキャリブレーションの負担なしで、20μm精度の制御ができるロボットプログラミングソフトウェア。
クルーボは簡単に、カメラを使った高精度なロボット制御ができるプログラミングソフトウェア。チトセロボティクスが発明した「キャリブレーションの負担なしで、0.02mmの超高精度制御を実現するロボット技術」を提供する。高度な画像認識と高速なロボット軌道制御が可能なコンピュータも付属し、必要なソフトウェアはすべてインストール済みなので、すぐに使い始めることができる。
株式会社チトセロボティクスは、「2023国際ロボット展」(2023年11月29日(水)~12月2日(土))に出展する。また、YouTubeチャンネルでロボット動画を多数公開している。
https://www.youtube.com/@chitose-robotics
産業用ロボット制御ソフト「クルーボ」カメラの画像認識でロボットアームが自律的動作 動画を公開 チトセロボティクス
毎時1,400枚のトレイを無人洗浄するロボットシステム「crewbo トレイ system」を展示開始 チトセロボティクス
「なぞる・とおす・つかむ」を簡単に実装 チトセロボティクスが開発者向けソフトウェア「crewbo studio」を発表
チトセロボティクス関連記事
チトセロボティクス公式サイト



