


国立研究開発法人科学技術振興機構(JST) が主催する、産学連携マッチングイベント「大学見本市2024 ~イノベーション・ジャパン」が8月22日、23日の日程で東京ビッグサイトで開催された。大学や研究機関の281件の研究成果が5つの分野別で紹介されるイベントで、ロボットに関連するものもいくつかあった。その中から特に印象に残ったものを紹介しておきたい。
■逆運動学の解の種類を変更することで特異点を「通過」する技術
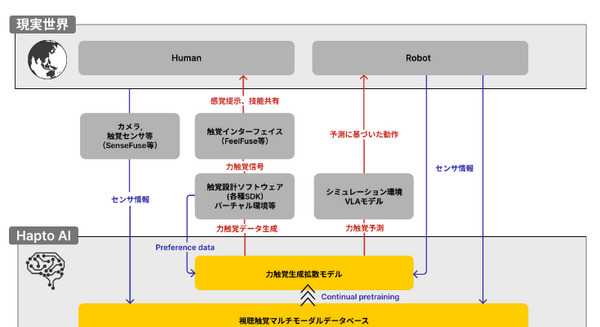
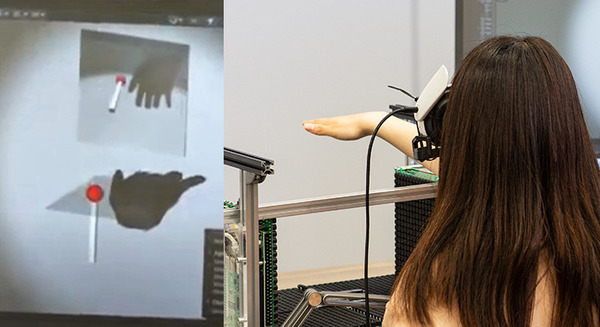
■ロボットに「触覚」を持たせるために
■ミリ単位で動作する微細手術支援デバイスの研究
■イガ栗と栗の実を同時に拾う回転式栗収穫機
■弱いエージェントを使った生活行動アノテーション支援システム
■X線防護衣の負担を軽くする補助具
■逆運動学の解の種類を変更することで特異点を「通過」する技術
*動画
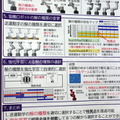
まず、同志社大学 理工学部機械システム工学科 教授 廣垣俊樹氏、同博士課程の加藤大暉氏らによる「機械学習で産業用ロボットの高運動速度精度な特異点通過」という研究はとても面白い。多関節ロボットには、計算上、ロボットの制御ができなくなるため回避しなければならない「特異点」と呼ばれる姿勢・位置がある。産業用ロボットは通常、特異点姿勢を避けるように制御されている。だがそのため一部の運動には制限が生じる。
加藤氏らは特異点を回避するのではなく「通過」、いわば「すり抜ける」手法を開発した。ロボットアームの軌道を計算するための、逆運動学計算するときの「解の種類」を変更して、特異点を回避する。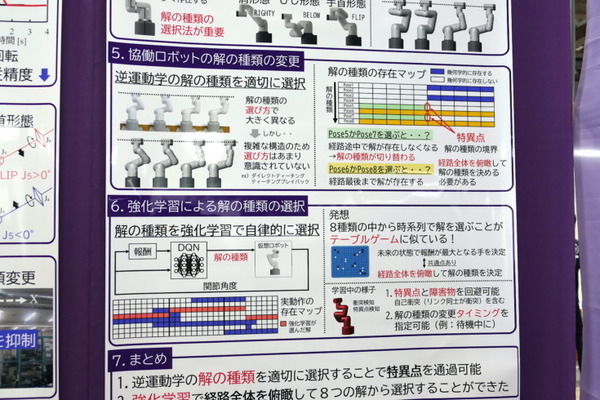
ルールベースでこの変更を行うのは大変だが、強化学習を使って解の種類の選択を試行錯誤させ、「実動作の存在マップ」から適切な解へと変更することができる。計算は秒単位で終わる。実際にはこの独自アルゴリズムを適用してロボットのコントローラーに制御信号を与えて動かす。自己衝突なども回避でき、解の種類の変更タイミングも指定できる。
オフラインティーチングによる産業用ロボットの用途拡大のために活用されることを期待しているという。特に挟まれ防止のためL型リンクが多く使われているため特異点が可動域内に多く存在し、解の選択方法が重要となる協働ロボットのオフラインティーチングには活用でき、大幅に現場レベルでの用途が拡大できるのではないかと考えているとのこと。
■ロボットに「触覚」を持たせるために
ロボット活用領域を広げるために重要だと考えられる技術の一つが、ハンド、特に手指でものを扱う技術だ。本連載でも、これまで何度か取り上げてきた(次世代のロボットに必要なものは「感覚を持つ指」か、「アタマ」か)。触覚に関する技術もいくつか出展されていた。そのうち2つを紹介する。
東北工業大学 工学部 電気電子工学科 教授 室山真徳氏らは「ロボット触感&人動きのデジタル化:鍵は集積システム」という展示を行っていた。LSIやMEMS技術、機械学習を使って、ロボットに対して全身触覚を与えることを目指している。トヨタとも共同研究を行なっているという。
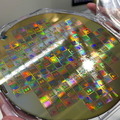
開発しているものはマルチチャネルに対応した「マルチセンサプラットフォームLSI」と、それを使ってLSI一体集積化触覚センサ。3軸の力と、温度を返す。それ以外のセンサーを繋げることもできる。従来よりも省配線のデバイスとし、イベントドリブンの考え方で、つまり押されたものだけがデータを送ることでデータ量を削減。信号圧縮の技術も使って高速応答できるという。時系列接触情報をリアルタイムに取得し、エッジで処理できる。人と同等の作業ができる介護ロボットのほか、人の動きの正確な把握などを目指しているという。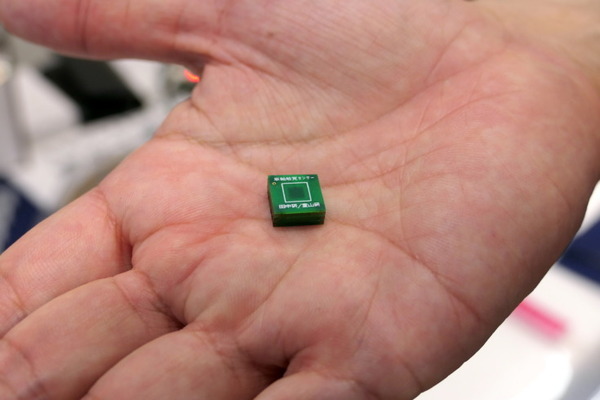
現在は用途探索フェーズだと考えて、より安価なプリント基板型触覚センサを使って、触覚センサ用途の開発も行なっている。こちらは発注から1週間程度でできてしまうので、用途に応じて機能を設計して、すぐに共同研究が可能とのこと。単なる触覚だけでなく、手先部分の制御も含めた課題解決を求められることが多くなっているそうだ。食品はニーズは多いが、まずは産業用の検品などからではないかと考えているという。
また、九州工業大学大学院 生命体工学研究科 人間知能システム工学専攻 助教の宇佐美雄生氏は「印加圧力を学習可能なスポンジ型触覚センサ」を出展していた。柔軟な「CNT-PDMSナノ複合体センサ」で、ロボットハンドなどに用いることができるのではないかという。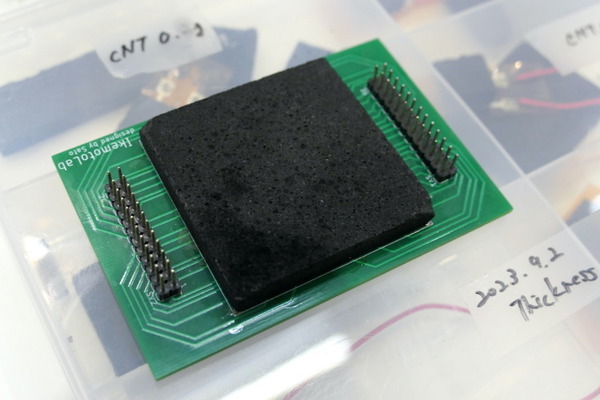
「ロボカップ@home」の強豪として知られる「Hibikino-Musashi」チームともコラボし、実際にロボットに物体を把持させたところ、8割を超える分類成功率を得たとのこと。安価に量産も可能で、リハビリ用途などへの展開も狙う。
■ミリ単位で動作する微細手術支援デバイスの研究
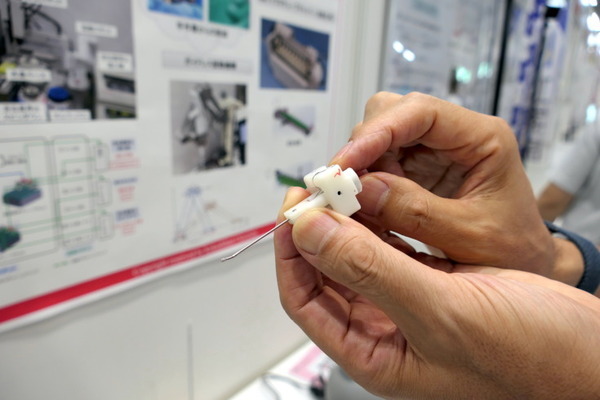
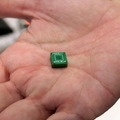
国士舘大学 理工学部 理工学科 機械工学系 教授の神野誠氏は、腹腔鏡手術で用いられている手術支援ロボットのようなデバイスを小型化したような、微細手術支援デバイスの研究を出展していた。たとえば眼球内の手術に用いることができるような微細なマニピュレーターだ。0.1mm程度のワイヤーやディスクを使って、微小な開閉や湾曲の動きが制御できる独自機構を開発している。
このほか、ラボラトリーオートメーション(実験の自動化)に関する研究も行なっており、分注用のマイクロチューブのキャップを開け閉めできるデバイスなどを開発している。
*動画
■イガ栗と栗の実を同時に拾う回転式栗収穫機

熊本高等専門学校 機械知能システム工学科 教授の湯治準一郎氏らは「イガ栗と栗の実を同時に拾う回転式栗収穫機」を出展していた。名前のとおり、地面に落ちたイガ栗とイガから外れた栗の実を同時に収穫する回転式収穫機構だ。この収穫機構をつけた移動ロボットに適切なルートで栗園内を走行させると、クリが収穫できるというものである。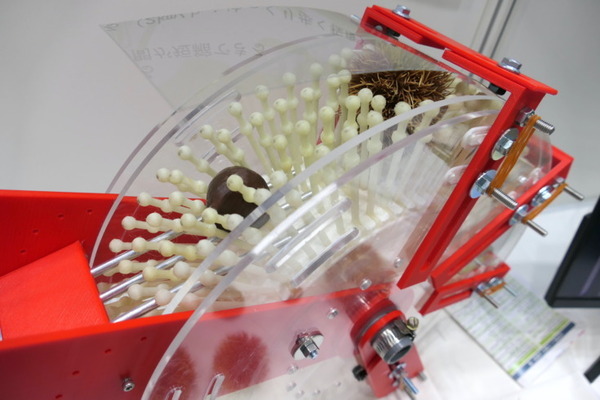
クリの収穫は現在、人手で行われている。市販の「手押し式栗収穫機」もあるのだが、栗を挟み込む回転ブラシの設置間隔の問題で、イガ栗と栗の実を同時に収穫することができない。この機構は柔らかいブラシを使い、回転ブラシの周囲にカバーをつけることでイガ栗と栗の実を同時に収穫できる。雑草の混入も防ぎながら、大きさや形、品種に関係なく収穫できるという。
*動画
もちろん、そのまま手押し式の栗収穫機にも使えるが、これを屋外移動ロボットにつければ自動収穫が可能になる。現在、ARマーカーを栗の木などにつける方式を検討している。現在、栗収穫ロボットの製造、機能追加に向けて、一緒に取り組める企業との共同開発を希望しているとのこと。
■弱いエージェントを使った生活行動アノテーション支援システム
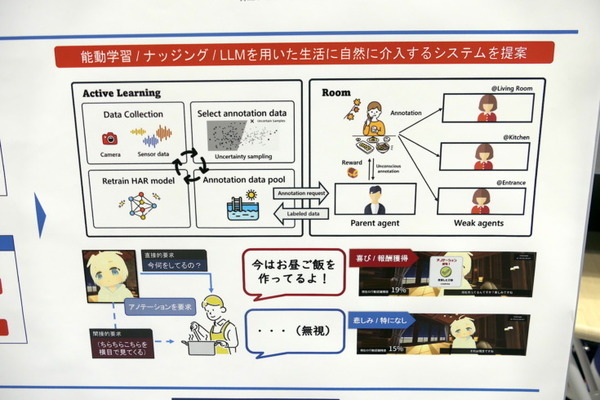
奈良先端科学技術大学院大学 助教の松井智一氏は、住宅内での生活行動のアノテーション支援システムの研究を紹介していた。住宅内で人が何をしているかということを機械で自動認識するためには、まずアノテーターによる正解データ作成や、行動データへのタグ付けが必要になる。だが、一部の実験環境ならともかく、まったくの日常的な家での行動に対して、いちいち住人がタグ付けするのはデバイス操作の課題も含めて負担が大きい。また第三者が他人の生活を見て正解データを作るのも、プライバシーの観点からあまり現実的ではない。
そこで、この研究では、ちょっとした仕掛けを使って少しだけ行動を変化させる「ナッジ」や、豊橋技術科学大学の岡田教授らが提唱する「弱いロボット」などの考えかたを利用することで、住人に対してタグ付けの動機を与えることを狙う。
*動画
具体的にはLLMでやりとりができるエージェントを使って、タグ付けすることでそのエージェントが成長したり、喜んだりすることで、タグ付けそのものに一種の喜びを与えるというものだ。
日常の生活の行動認識は、今後、家庭内にサービスロボットなどが導入されるときには、必ず必要となる技術だ。いっぽう人間は、身近な人なら、足音のようなちょっとした床の振動を感じただけで、どこで何をしているのか、相手の気分に至るまで、だいたい見当がつく。理想的にはカメラなどは使わず、電気のオンオフや振動など、人の邪魔にならないようなセンサー類だけを使って行動が認識できると望ましい。この分野の今後には注目しておく必要がある。
■X線防護衣の負担を軽くする補助具
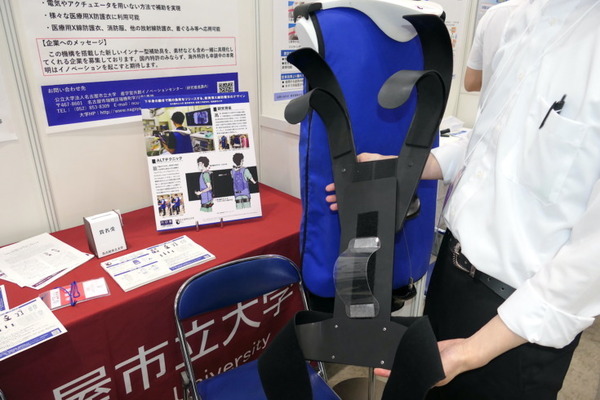
最後に一つ面白かったのが、名古屋市立大学 助教の堀寧氏による「X線防護衣による肩こり、これで良くなるかも!?」という研究だった。これは医療従事者が業務中に受ける被ばくを抑制するための防護衣を着用する際の、身体的な負担を軽減する技術を搭載した、着用負担を軽減する補助具だ。
ずっしりと重たい放射線防護衣を着用することによる腰痛を予防するためのもので、要するに肩だけではなく、腰へと重量負担を分散させるようになっている。
極めて単純な仕組みだが、実際に試させてもらったところ、確かに、かなり軽くなったように感じた。来場者からの評判も上々のようで「これは売れる」と言われたそうだ。軽労化を目的とした様々なアシスト機器があるが、それよりもはるかに安価で、しかも着用も簡単そうなので、実際に使われるようになるかもしれない。他への応用もあり得るかもしれない。
ロボットの見方 森山和道コラム