
三重大学、国際電気、デクセリアルズ フォトニクス ソリューションズ、KDDI総合研究所、東洋電機の5者は、2025年2月19日、三重県津市の三重大学 講堂・三翠ホールにおいて、走行中の自律移動型警備ロボットとの間で、独自に開発したテラヘルツ帯トランシーバを用いてGbps級で高速通信するフィールド実証に成功したことを明らかにした。自律移動する警備ロボットとのGbps級テラヘルツ帯通信実験は世界初となる。
さらに、2025年4月22日、東京都小平市の国際電気 東京事業所構内において、「テラヘルツ帯通信システムとオール光型光無線通信システムを縦続接続し、大容量データを伝送するフィールド実証」に成功。これにより、テラヘルツ帯通信システムと光無線通信システムの特長を組み合わせることが可能であることが示された。また、光ファイバおよび光無線で伝送した光ツートーン信号からテラヘルツ帯の搬送波を生成する、光・無線融合型の構成を採用したことも、特徴の一つである。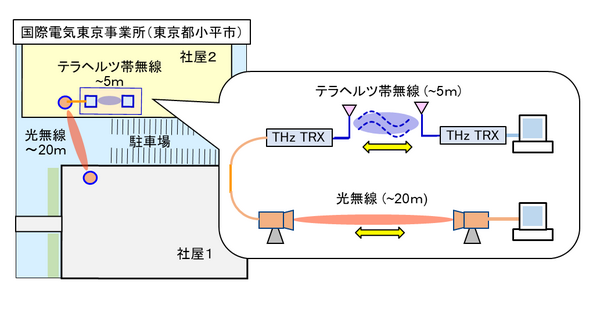
以上の成果により、それぞれの単独システムでは対応が難しかった新たなユースケースへの適用が期待できる。
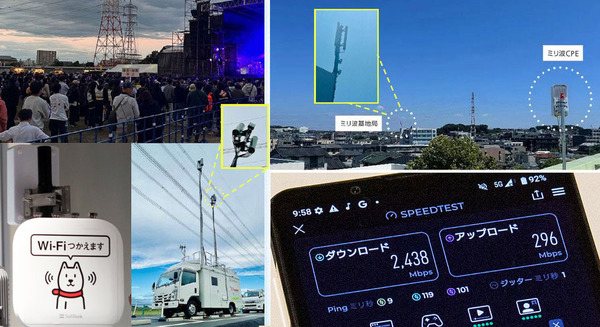
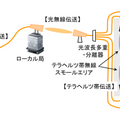
例えば、大規模イベントの会場に最寄りの光ファイバと会場を光無線で接続し、会場内に複数のテラヘルツ帯スモールエリアを設置して、エリア内を走行する自律移動型警備ロボットとの高速通信を可能とするようなユースケースが想定される。会場直近の光ファイバから例えば会場の屋上と光無線で接続し、会場内に複数のテラヘルツ帯スモールエリアを構築する。一般来場者向けの臨時設営回線と分離することで、大容量データ通信が可能となる。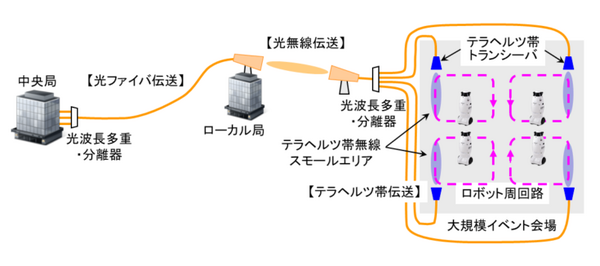
研究開発の背景
本プロジェクトでは、Beyond5G無線で要求される「超高速性(>10Gbps/ch)」、「低遅延性(~100μs)」、「多数同時接続性(~100ch/m2)」を実現するための高度な通信技術および電波・光融合無線技術の研究開発を進めてきた。特に、開発したテラヘルツ帯通信システムおよび光無線通信システムの早期の社会実装に向けた取り組みを重視し、それぞれ単体の通信システム、さらには両システムを縦続接続した通信システムについて、将来のユーザに訴求するためにリアリティのあるユースケースをそれぞれ例示するべく、フィールド実証デモを企画・実施することとした。
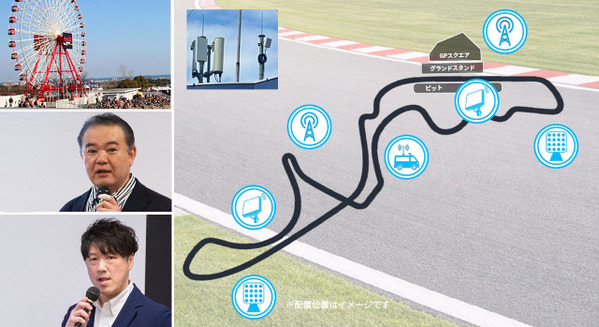
光無線通信システム単体については、2024年10月にユースケースとしてモータースポーツイベントの中継を想定した複数チャネル非圧縮多視点映像の大容量伝送のフィールド実証デモを実施し、機動的な臨時回線の設営性、および光ファイバ通信システムとのシームレスな接続性を実証した。
実証1:自律移動型警備ロボットとの高速テラヘルツ帯通信実験
日付:2025年2月19日
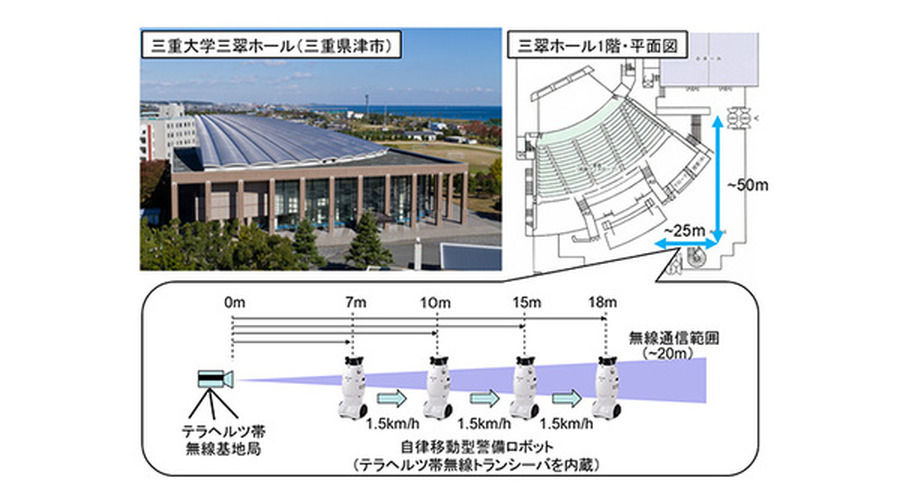
場所:三重大学講堂・三翠ホール
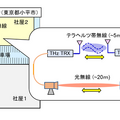
内容:今回の実証1では、国際電気が開発した小型テラヘルツ帯トランシーバを使って実証試験を行った。自律移動型警備ロボット(SEQSENSE製)の筐体内部に本プロジェクトで開発したテラヘルツ帯トランシーバを実装し、ロボットが時速約1.5kmで移動中に対向する固定基地局のテラヘルツ帯トランシーバとの間で双方向通信実験を実施。三重大学講堂・三翠ホールのホワイエに基地局を設置してアンテナを調整し、テラヘルツ帯通信が可能になるエリア(幅~1m、長さ20m)を設定し、自律移動型警備ロボットが通信可能エリアを走行中にデータ通信を行い、4.54Gbpsの通信速度が得られることを確認した。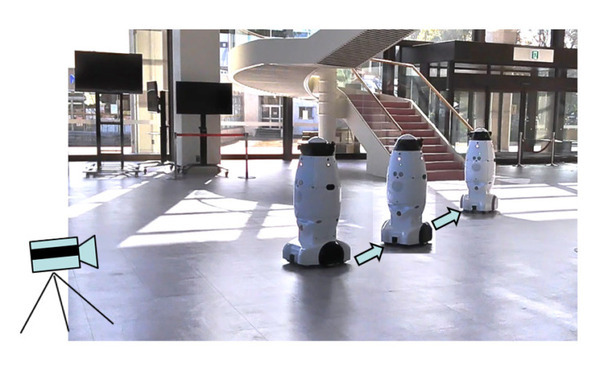
特徴:屋内のユースケースを想定して、床面反射によるマルチパスフェージングおよび空間伝搬減衰を考慮した上でテラヘルツ帯スモールエリアを設定し、自律移動型警備ロボットがエリア内を通過する時間内にデータ伝送を行いました。これにより、世界で初めて、自律移動型ロボットに対するGbps級のテラヘルツ帯双方向通信を実証した。データ通信用のインタフェースに、イーサネット規格に準拠した市販の25GbE SFPトランシーバを利用したことも、特徴の一つに挙げられる。さらに、市販の警備ロボットにテラヘルツ帯トランシーバを内蔵するというコンパクトな実装形態を実現したことも、特筆できる特徴の一つである。
実証2:テラヘルツ帯・光無線縦続接続通信実験
日付:2025年4月22日
場所:国際電気東京事業所・構内(東京都小平市)
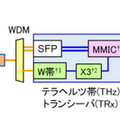
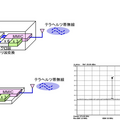
内容:敷地内で対向する二つの建物の窓際に東洋電機が開発した光無線トランシーバを設置し、屋外伝送距離は約20mとした。また国際電気が開発したテラヘルツ帯トランシーバは電波無響室内に設置し、伝送距離は約5mとした。光ファイバ伝送部の構築はKDDI総合研究所が担当しました。サーバのインタフェースは実証1と同様に25GbE SFPを用い、波長多重器を用いて一芯双方向伝送とした。また下り信号については、光・無線融合型の構成を採った。
具体的には、波長多重器で光ツートーン信号を25GbEデータ信号と多重・分離してテラヘルツ帯トランシーバまで伝送後、DXPSが開発したW帯フォトレシーバで91GHzのトーン信号を抽出し、三逓倍して生成したテラヘルツ帯搬送波(273GHz)をデータ信号で変調した。以上の構成により、実証1と同じ4.54 Gbpsの通信速度が安定的に得られることを確認した。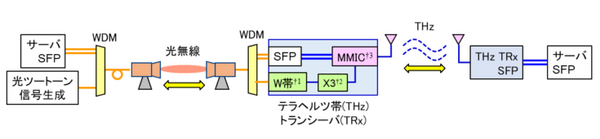
特徴:図5に示すような光ファイバ、光無線およびテラヘルツ帯の各伝送方式それぞれの長所を組み合わせた縦続接続型ハイブリッド伝送システムを構築し、実証1で示したテラヘルツ帯通信システムのユースケースをさらに拡張できる可能性を示しました。下り信号については、光・無線融合型の構成でテラヘルツ帯トランシーバの小型化・省電力化を図ったことも特徴の一つである。
テラヘルツ帯トランシーバについて
次世代の無線通信での利用が有力視されている「テラヘルツ帯」の電波を用いて、高速・大容量通信を実現することができる。従来の無線通信で用いられている「マイクロ波」や「ミリ波」に比べて周波数が10~100倍高いため、100Gbps級の大容量通信が可能である。
国際電気が開発したテラヘルツ帯トランシーバは、テラヘルツ帯搬送波を光ツートーン信号から生成する機能を搭載しているために、制御局から無線信号の周波数を直接、正確に制御することが可能となっている。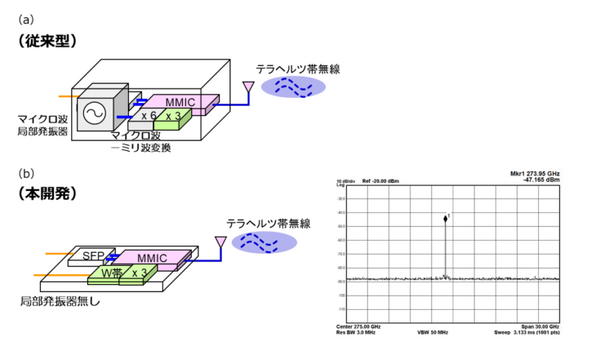
月面基地ロボット、海底ロボット、空飛ぶ基地局HAPS、触覚グローブの操作体験など見どころ紹介 総務省「Beyond 5G ready ショーケース」大阪・関西万博
【世界初】遅延時間を50分の1に短縮「ポスト5G半導体チップ」を開発 超低遅延通信を実現 NEDOの委託事業
ソフトバンクと東京科学大 5G通信の干渉を抑える新技術、屋外実証実験に成功 地球局との共存めざす革新的な干渉キャンセラー
京セラが通信インフラ基地局事業に参入 AIを活用した5G仮想化基地局を開発・商用化 「O-RU Alliance」の設立も発表
NTT東日本/三菱電機 膨大な3次元点群データをIOWN APNの100Gbps通信でデモ インフラ点検の遠隔解析・遠隔閲覧に成功