明治大学、宮城大学、東京大学、法政大学、株式会社メルカリmercari R4Dらで構成される研究グループは、独自の風船構造を持ち、軽量でさまざまな形状を実現可能なパーソナルモビリティ「poimo」(ポイモ)をシリーズ開発してきた。
今回、この研究グループは、風船構造モビリティの乗車スタイルに合った、クッション型のやわらかいコントローラ(操縦装置)と、安定した乗車が可能なソファ型モビリティの実用化に向けた試作機を開発。この実演と発表を、カナダ・バンクーバーで8月9日(火)~8月11日(木)に開催される国際会議「SIGGRAPH 2022 Emerging Technologies」にて行うことを発表した。論文も公開した。
明治大学・宮城大学・東京大学大学院工学研究科・法政大学の研究チームは主にモビリティのボディ設計を担当し、東京大学大学院情報学環・株式会社メルカリの研究チームはやわらかいコントローラの設計と実証実験を担当した。
明治大学理工学部 新山龍馬専任講師、宮城大学事業構想学群 佐藤宏樹准教授
東京大学大学院工学系研究科 鳴海紘也 特任講師、川原圭博教授
東京大学大学院情報学環 筧康明教授、元修士課程学生 渡辺啓介氏
法政大学デザイン工学部 Seong Young ah客員准教授
株式会社メルカリmercari R4D 山村亮介氏
poimoの特徴
やわらかく軽いボディのモビリティ
poimoは風船のような構造の電動パーソナルモビリティで、丈夫な布を空気で膨らませた構造をボディに採用している。ボディが軽量で、空気を抜けば平たく押しつぶすことができるユニークな乗り物。
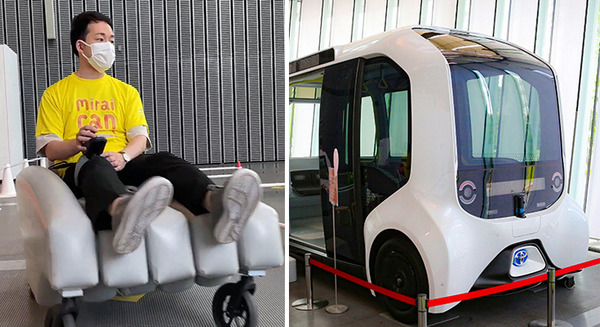
クッション型のコントローラを開発
変形すると電気抵抗(インピーダンス)が変化する特殊なスポンジを内蔵したクッション型のコントローラを開発し、それを握ることで直進や停止、旋回を可能にした。
安定性の高いソファ形状の試作機を開発
実用化に向けて、安定性の高いソファ形状の試作機を開発。また、実際の歩道や道路に近い環境で実証実験を行い、今回、実際に試乗できる形で展示する。
パーソナルモビリティの乗り心地やカスタマイズ性に着目
電動のキックボードや自動搬送ロボット、デザイン性に優れた電動車椅子など、超小型の新しいモビリティが注目されている。個人で利用することからパーソナルモビリティとも呼ばれるこれらの乗り物は、現在各地で実証実験が進められており、多様な交通手段のひとつとして法的にも認められつつある。
一方で、同開発チームは「乗り心地の良さ・安全性・収納性・ユーザーの嗜好に合わせたカスタマイズ性などには改善の余地がある」と感じた。
同開発チームは、風船構造のパーソナルモビリティを開発し、発表してきた。これまで、スクーター型やスポーツバイク型を試作し、(1).リュックサックに入れられる形状から乗り物として十分な体積まで形状変化が可能であること、(2).個々のユーザーに合わせてカスタマイズとオーダーメイドが可能であること、などを検証してきた。それと同時に、より多くの人に使ってもらうために、多様な人が安全に、安定して乗れる新しい形と操縦方式を探ってきた。
「SIGGRAPH」で展示
研究グループは、poimoシリーズの最新型として実用化に向けたソファ型モビリティの試作機を開発し、その設計、新たな制御手法および実証実験に関する報告と展示をカナダ・バンクーバーで行われる国際会議「SIGGRAPH 2022 Emerging Technologies」で行うことになった。
新しい「poimo」の改善点
新しい「poimo」は、4輪を備えた安定性の高いソファ型となっており、旧型「poimo」のように乗り手がバランスをとる必要がなく、誰でも簡単に乗ることができるよう改良した。そのような幅の広い構造を実現するために、ドロップスティッチ布と呼ばれる丈夫な布地で作られた風船構造の軽量な板を5枚重ねる構造とした。
また、電動車椅子用の駆動モジュールを採用することで、可搬重量や登坂性能、走行時間を改善した。
クッション型コントローラを開発
また、直感的な操縦を可能にするため、通常の乗り物に見られるようなハンドルやリモコン、ジョイスティックなどの硬い材料を利用した入力インタフェース(コントーラ)ではなく、柔軟材料によるセンシング技術を活用したクッション型コントローラを開発した。クッションの両端を同時に握ることで直進、左右どちらかを握ることでそれぞれ左右の旋回が可能となっている。
クッションの内部には導電性のスポンジが埋め込まれており、握ったことによる電気抵抗(インピーダンス)の変化を計測することでセンシングを行う。クッションは、手で握るだけではなくネックピローとして首を預け、頭を傾けた方に車体を動かすというような使い方もできる。やわらかい操縦装置は、ぶつかっても人間を傷つけないという特徴もある。
一般ユーザーを対象に実証実験、不整地路面での実験も
さらに「poimo」の社会実装を進めるために、野外での走行実験を実施。まず予備実験として、東京ポートシティ竹芝と鹿島スタジアムにおいて試乗会を行なった。幅広い年齢層の約200名の参加者が試乗を行い、一般ユーザーでもすぐに「poimo」を操作できることが実証されたという。
次に、より現実的な環境での検証を行うために、ハウステンボス(ヨーロッパ・オランダの伝統的な石畳のあるテーマパーク)で走行実験を行なった。この実験では、開発者らが約48時間にわたって「poimo」に乗り、凹凸のある不整地路面でも快適に走行できることを確認した。
研究グループではこれまで、風船構造の乗り物自体に加え、「小さくたためる」「オーダーメイドできる」など、従来の乗り物では実現できない風船構造ならではの利点を提案してきた。今回、実用化への課題・目標が複数達成されたことにより、poimoの社会実装がより現実的になったとしている。
同グループは「今後、さらなる実証実験とユーザーからのフィードバックを元に、操作性・信頼性・安全性などを向上させていく予定です」と語っている。
論文情報
<タイトル>
Demonstrating poimo as Inflatable, Inclusive Mobility Devices with a Soft Input Interface
(日本語訳:やわらかい入力インタフェースを備えたインクルーシブな風船構造の乗り物poimoの実演)
<著者名>
Hiroki Sato*, Ryuma Niiyama*, Koya Narumi, Young ah Seong, Keisuke Watanabe, Ryosuke Yamamura, Yasuaki Kakehi, Yoshihiro Kawahara (*Contributed Equally)
<国際会議名>
ACM SIGGRAPH 2022 Emerging Technologies
(アメリカ計算機学会のコンピュータグラフィックスとインタラクティブ技術に関する世界最大規模の国際会議、その中の最新技術の展示・実演をするEmerging Technologies部門)
<DOI>
https://doi.org/10.1145/3532721.3544020