



Telexistence株式会社(TX)とセンコー株式会社は、TX製ロボットソリューションの導入に向けた実証実験をセンコーの物流施設で実施したことを2022年10月21日に発表した。
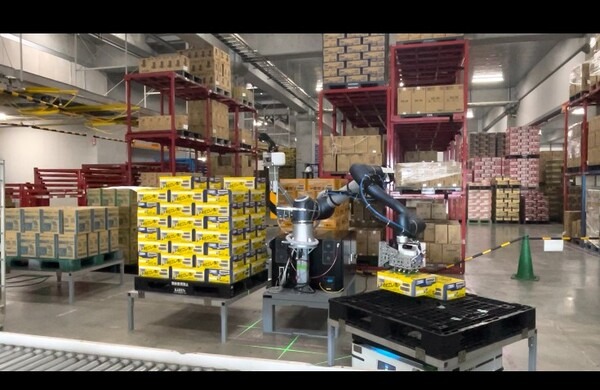
同実証実験では、TX独自AIシステムによる自動制御と人による遠隔操作のハイブリッド制御ロボット技術を核としたTX製ロボットソリューションの特徴である、マルチタスク性とマルチロケーション性に関する検証を行った。
TXは今後、混載パレットのコンベア投入など複雑な手荷役への対応や動作速度の向上などを行い、2023年には、センコーの物流施設において、実際の業務にTX製ロボットソリューションを組み込んだ試験運用の実施を予定している。
また、センコーは今回の実験で、既存の物流施設でロボットを複数の作業場所に移動させて、人に代わってさまざまな手荷役作業を環境に応じて的確に業務遂行できるのか検証。今後も先進技術の導入を通じて、作業者の負担軽減や作業時間短縮によるワークライフバランスを図り、人手不足などの物流現場の課題解決につなげて利用者の期待に応える物流サービスを提供できるよう取り組みを続けて行くと述べている。
同実証実験での主な検証事項
同実験では、主に、専用マテリアルハンドリング機器無しに、複数種類の手荷役を担えるか(マルチタスク性)と、事前ティーチング無しに、複数の作業場所で稼働できるか(マルチロケーション性)について検証した。今回の検証により、マルチタスク性とマルチロケーション性を兼ね備えたロボットソリューションが確立されることは、大型自動化設備の採用が難しいとされる既存物流施設や中規模物流施設への導入を可能とし、人件費高騰や慢性的な人手不足が深刻化する物流業界の課題解決につながるだろう。
| マルチタスク性 | ・パレットからコンベアへの投入作業を担えるか ・パレットからカートラックへの積み付け作業を担えるか |
|---|---|
| マルチロケーション性 | ・周辺環境の情報を事前に登録することなく、作業毎に異なる場所で稼働できるか |
同実証実験での主な技術的特徴
同実験での主な技術的特徴は以下の3つとなる。
| 1. | 複数種類の手荷役を異なる作業場所で行うために必要となる周辺環境情報の登録を、遠隔操作オペレーターがリアルタイムかつ簡易に実行するための独自アプリケーションを開発 |
|---|---|
| 2. | 対象物や把持点の認識、動作計画生成など、コンベア投入及びカートラック積み付けに係る一連の動作を自動制御するための独自AIシステムを開発 |
| 3. | 把持面にミシン目のあるケースや強度の弱い素材が使われたケースにも対応した独自ロボットハンドを開発 |
両社による実証実験概要
| 実施日 | 2022年10月21日 |
|---|---|
| 場所 | センコー(株) 西関東ロジスティクスセンター |

■【動画】Telexistence、センコー株式会社、TX製ロボットソリューションの物流施設導入に向け実証実験を実施



