



AIを利活用したサービスによる社会課題解決に取り組んでいるスタートアップの株式会社エクサウィザーズは、国立研究開発法人 宇宙航空研究開発機構(JAXA)と同社の模倣学習・予想学習技術を使って、宇宙でのロボット操作の自律化の研究開発を行っている(2023年1月16日付リリース)。
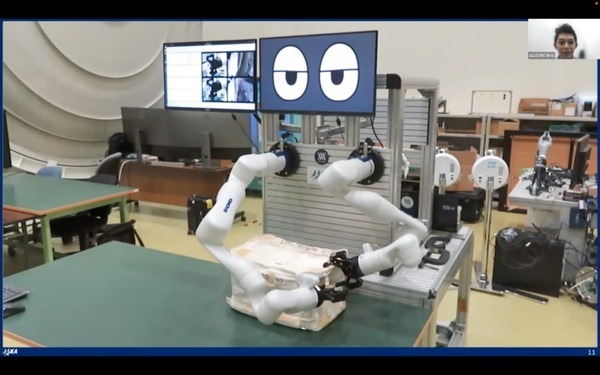
国際宇宙ステーション(ISS)では、様々な物品の輸送や収納に、やわらかいバッグ、「物資輸送用バッグ(CTB: Cargo Transfer Bag)」が用いられている。物品の準備や片付けはISSでも日常的に存在するが、やわらかい物体を扱う作業の自動化は難しく、結局は宇宙飛行士が行っている。このような操作に対して模倣学習を使うことで、遠隔操作ではなく操作作業の自律化を検討する。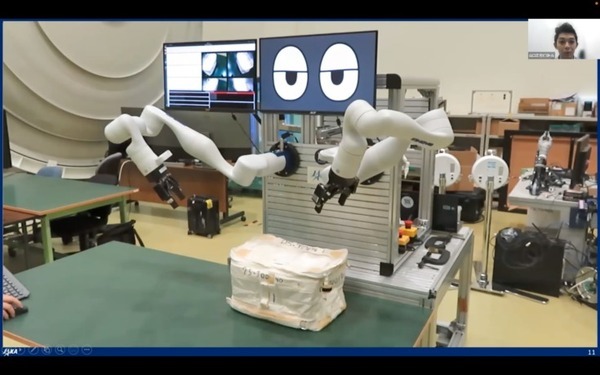
2月15日には、模倣学習・予想学習技術を使った宇宙拠点内でのクルー作業の自動化・自律化の取組みに関わるJAXA 有人宇宙技術部門 有人宇宙技術センター研究開発員の山口正光ピヨトル氏と同 主幹研究開発員の大塚聡子氏、そしてエクサウィザーズのAIプラットフォーム部 exaBase serviceグループ AIコンサルタントの伊東和哉氏らが取組み内容や課題、将来展望を紹介した。
宇宙でのロボット活用に求められているもの
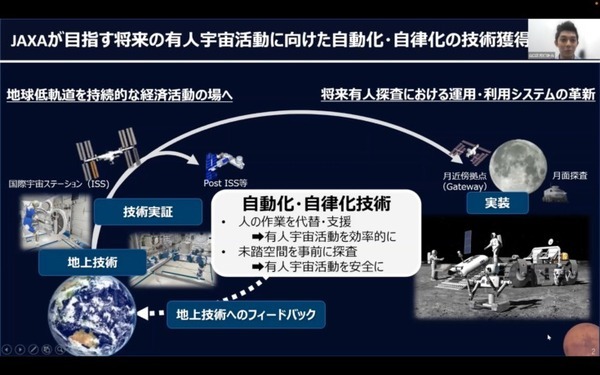
山口正光ピヨトル氏はまず、現在の宇宙飛行士がどのような活動をしているのか、それをどのように助けていきたいと考えているのかを説明した。宇宙には行ける人数も限られている。無人探査もあるが、人が行くことに意義・価値がある場所もある。人がいる環境での作業をより効率化し、より安全にするために自動化技術を使いたいと考えているという。
では実際に宇宙飛行士は何をしていて、ロボットに何をさせたいのか。山口氏はISSを使って解説した。ISSでは宇宙飛行士が与圧された微小重力環境、あるいは宇宙環境に曝露された部分を利用して科学実験を行っている。時間は限られているので効率的に実験を進める必要がある。
また今後将来には、月周回、月面有人探査、惑星探査も予定されている。そこではさらに時間も行けるクルー人数も限られるのでロボット活用が期待される。
まずは自動化技術をISSで実装することで、今後の月などでも使えるようにしていきたいという。そのためにはできるだけ地上の最新技術を使い、成果をフィードバックしていく必要がある。
ロボットアームは現在のISSでも使われている。宇宙空間で飛行士が船外に荷物を出し、アームを使って船外で取り付け作業を行う。そのような作業をより安全・効率的に行うためのロボットアームだ。ペイロードには宇宙ロボットに特化したインターフェースが付けられている。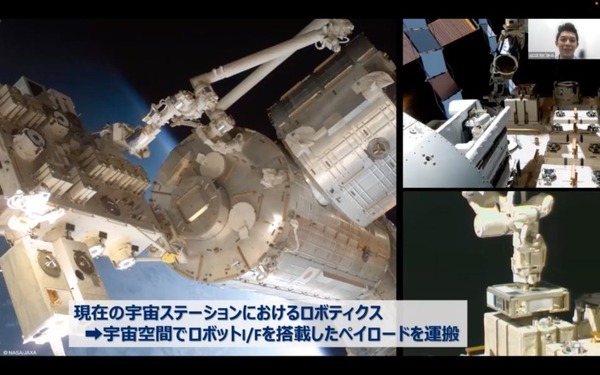
いっぽうISS内ではスペースも、クルーの時間も限られている。できるだけ軽量で、スペースを圧迫しない小型ボディが必要となる。
ISSの日本の「きぼう」実験棟では、船内ドローンの「Int-Ball」、NASAの「Astrobee」などの運用がテストされている。実証したい技術は様々あるが、微小重量下では動きの予測が難しい柔軟物体の操作はロボットにとっては大きな課題だ。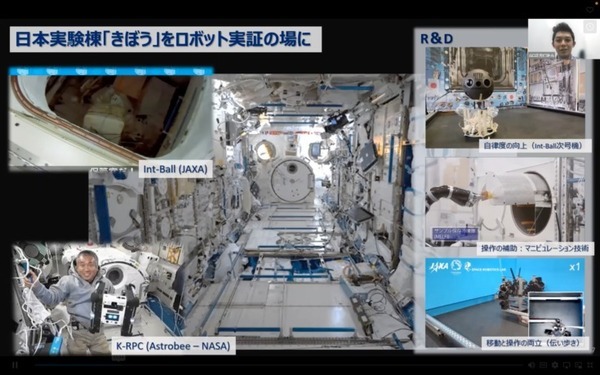
荷物のバックのジッパー操作、ハーネスやコネクタなどの操作は必要な作業だが、微小重力下での動きの予測は難しい。遠隔操作するにしても通信遅れもあり、双方向の操作は難しい。そして質量、電力、排熱、通信帯域は限られている。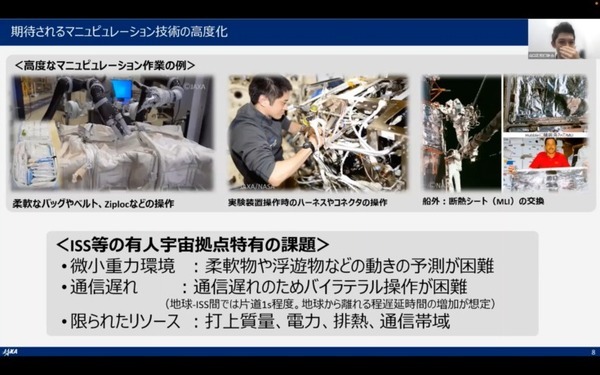
そこで、模倣学習による自律制御での柔軟物操作に着目しているという。山口氏は「地上の技術を宇宙でも使いたいと考えている」と述べた。エクサウィザーズとはまず、前述のバックのジッパー操作を自律で行う実験を進めている。課題はあるが、地上ではある程度成功している。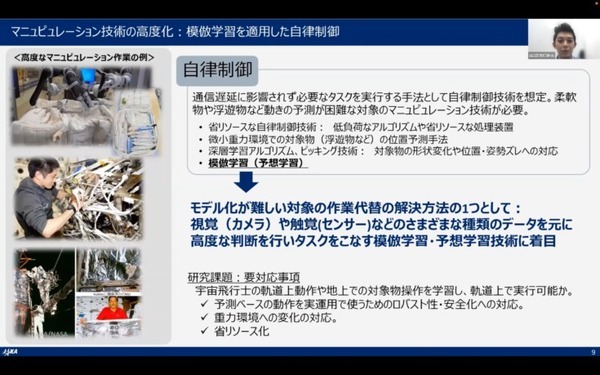
今後も「きぼう」をロボット実証の場として活用し、運用の効率化・安全性の向上を目指しつつ、将来探査・宇宙利用に向けた技術獲得を目指す。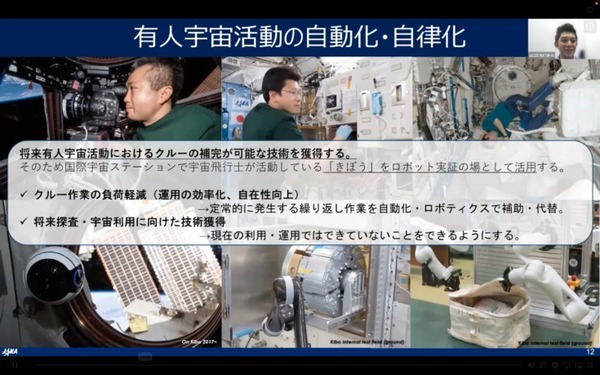
「exaBase ロボティクス」と予想学習の活用
エクサウィザーズの伊東和哉氏は「予想学習(Predictive Learning)」と「exaBase ロボティクス」について紹介した。
「exaBaseロボティクス」は、人の五感にあたるセンサーからのインプット(マルチモーダル情報)を用いて、複雑な作業をロボットに自動・自律で行わせるためのAIプラットフォームだ。変形する柔軟物であるタオルの折り畳み、粉体の秤量、液体の秤量、パンケーキ盛り付けなど、これまではロボットでは実現が難しいと言われている作業の自動化に取り組んでいる。いずれも、色々な判断基準や情報を用いて人がやっている作業だ。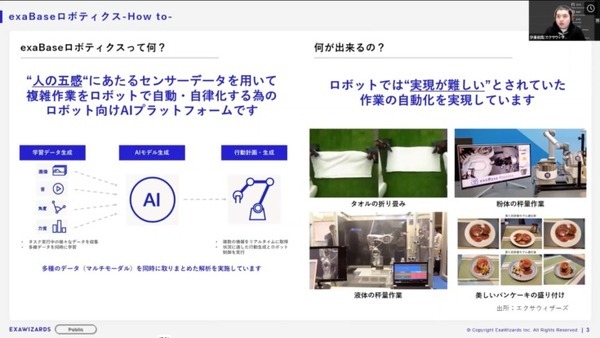
たとえば予想学習を用いて、過去の作業データを学習し、1秒先の未来を予想してタオルのような不定形物を折りたたむことができる。また人と遜色ない精度(誤差数%)で、スプーンを使った粉体の秤量もできる。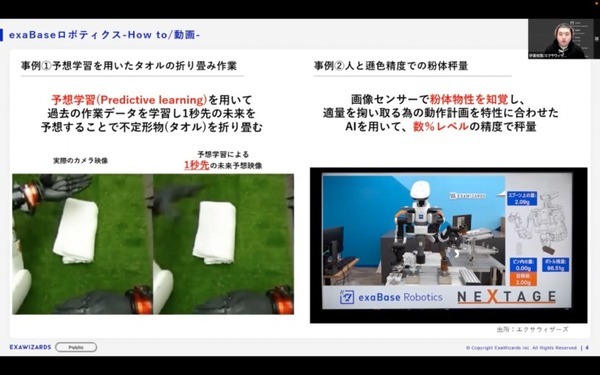
世界初の「パンケーキ盛り付けAIロボット」国際ロボット展で展示 ミシュランシェフの盛り付けセンスを学習 エクサウィザーズ(2022年3月2日)
粉体秤量を自動化する「exaBase ロボティクス 粉体秤量 for NEXTAGE」発表 カワダロボティクスとエクサウィザーズ(2022年11月21日)
AIが天ぷら調理の習得に挑戦 エクサウィザーズとロイヤルホストが「調理AI」の開発で協業(2023年2月8日)
従来のロボットは基本的にはティーチング・プレイバック、つまりプログラムされた動作を繰り返すことで動き、そのような使われ方をしてきた。すなわち、取り扱う対象も動作も、同じ作業の繰り返しを行なってきた。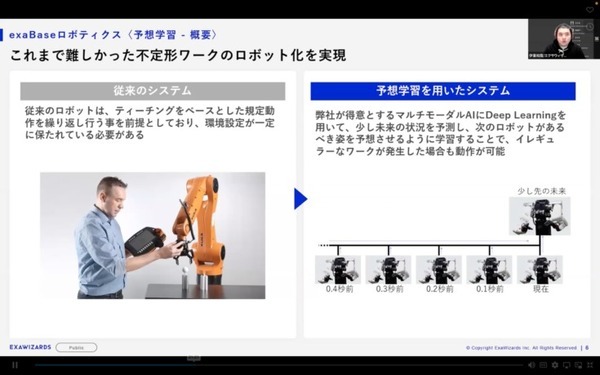
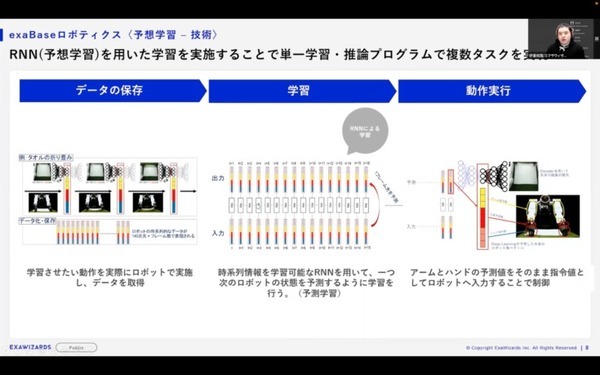
今後、予想学習が使われるようになれば、より柔軟な作業が可能になる。エクサウィザーズの技術では、もともとの情報量が異なる画像情報、力覚情報、ロボットの関節角度情報などを均一化して、時系列で学習を行わせる。それによって過去の学習データをもとに、未来の状況を予想し、その状況を実現する動作指令を生成して、ロボットを動作させられるようになる。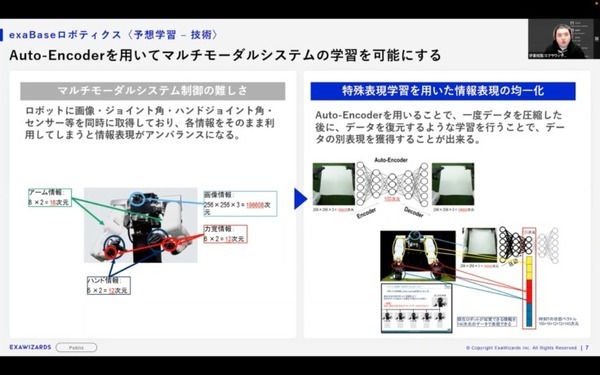
JAXAと取り組んでいるジッパー開けにもこの技術が用いられている。チャックを実際に操作したりバックが変形する様子を過去データから予想しながら、力加減を調整しながら開けることができる。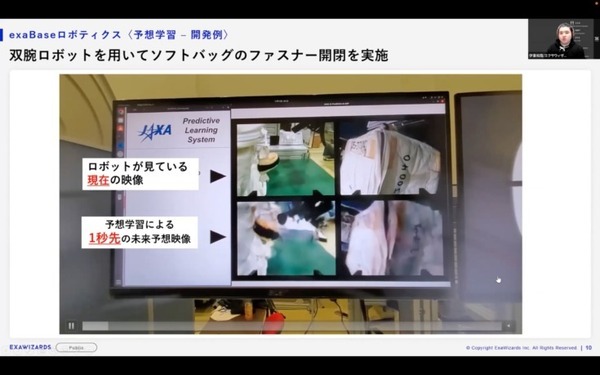
日本主導の宇宙ロボットへの流れを作りたい

このあと、エクサウィザーズ伊東氏が司会となり、ディスカッションも行われた。最初のテーマは「宇宙と地球でのロボットおよびAI技術に対する他国の取組状況とJAXAがこの領域に取り組む意義」。ちなみに議論テーマの一部は「ChatGPT」に作らせたという。
ISSでは様々な国の人たちが宇宙活動を行っている。JAXA山口氏は「各国が協力している面と競争している面がある。日本だけではなくカナダやヨーロッパのロボットアームもある」と紹介した。
「きぼう」ロボットアームの開発に携わり、いまは次世代宇宙ロボットを構想しているJAXA大塚氏は「AIを取り込んでいかなくてはならないくらい作業が複雑になっている。宇宙開発を助けてもらえるのではないかという期待感はすごくある。自分は宇宙一筋だったので地上の技術はあまり知らないが、ロボット・AIは日本が誇る技術だとよく言われている。その領域を宇宙で適用する時に、日本が主導できるような流れを作りたい。JAXAが取り組むべき意義は、その流れを作るところ。流れに乗って産業界の人が一気に流れ込んできてくれるといいと思っている」と語った。
エクサウィザーズ伊東氏は「移動ロボットは飲食などでも身近になってきている。地上に限らず人がいる場所では課題は共通なのかなと思う。日本から世界に誇れるアウトプットができれば。JAXAから世界に誇れる技術が出るといい」と受けた。
AI・ロボットによる自動化で、人には「本当にやってほしい作業」を
2番目のテーマは「宇宙での自動化・自律化技術が導入されることがクルーの役割に与える影響は」。エクサウィザーズ伊東氏はロボットによる自動化に対する社会的懸念があることを指摘した。「仕事をとられるのでは」という話だ。
JAXA山口氏は「限られた時間のなかで、本当にやってほしいことをやってもらうための自動化。例えば人だからこそ感じられることもある。そのための負荷を軽減したい。『奪う』のではなく、本来やってもらいたい仕事を増やす考え方だ」と語った。
JAXA大塚氏は「今はクルーに運搬作業もやってもらっている。それはもったいない。本当は実験装置に対する操作に専念してほしい。役割分担してほしい。宇宙飛行士は本当に素晴らしい方々で、時間的余裕があれば、もっと素晴らしいことをやってほしい。そこに効果がある」と述べた。
また、もうひとつの効果にも期待しているという。「マニュアルのクルマがオートマになると、いろんな人が運転できるようになる。それと同じようなことができれば、宇宙の敷居が下がるはず。そういう広がりにも期待している」(大塚氏)。
伊東氏は「宇宙にはなかなか行けない。そのハードルが下がる。将来、民間企業が宇宙に進出していくときにも有益な技術になるかなと思う。宇宙に行きたい、進出したいと思っている人はいっぱいいる」と述べ、「人がより集中して仕事ができるようになる、より時間を作っていくことが地上との共通点。人が行う作業に価値を見出していくところは同じ」と語った。
■動画
宇宙と地球の共通課題
3番目のテーマは「宇宙と地球でのロボットおよびAI技術の共通課題と可能性」。地上と同じような技術を使うことで解決できる仕事があるのではないかというわけだ。
山口氏は「全体的に、難しいところは似ている」と語った。「宇宙特有の課題はもちろんある。しかし、人協調のような部分や、柔軟物の扱いなどは似て。色んなところでいかに人の作業を支援・代替するか。むしろ違う部分よりも似ている部分がいっぱいあるので宇宙でも試していきたい」と語った。
伊東氏は「人が作業していれば場所は限らないのかなと思った。環境の違いはあるし、取り扱い方が違うことはあるが、そこにもAIやロボットが使えるようになれば『地上でもこんなことができるんじゃないか』ということはあるか」と問うた。つまり、重力環境に対するロバスト性があれば、地上でも使えることが増えるのではないかという論点だ。また遠隔操作における通信遅延や不安定性への対処などは、実際に多くの人たちが取り組んでいる共通課題だ。
大塚氏は「宇宙システムは閉空間で電力・排熱も制約が多い。そういうところで成立するロボットシステムなら地上でも導入しやすくなる。宇宙からのフィードバックはありえる」と述べた。
そして共通課題だと思っているのはリードタイム、リードコストだと語った。既に出来上がっている部分に追加でロボットを入れる、そのための導入時の労力が大変で「なかなか受け入れてもらえない」という。「最初の導入には労力がかかる。そこを乗り越えると便利だと思ってもらえるけど、そこをどうやって乗り越えているのかについては教えてほしい」と語った。
エクサウィザーズ伊東氏は導入の苦労について同意。「なかなか現場の方にリテラシーがないとか、オペレーションを変えないでほしいという話はよく伺う」と述べ、自動化・自律化する価値については例えば人に対するガイダンスツールという側面もあり、「人に寄り添うテクノロジーだというと『そういう使い方もあるんだね』と言われることがある」と語った。ロボットはイメージ先行で期待値を持っている人も少なくない。だが、最近はその辺も落ち着いてきたという。
■動画
今後はさらに様々な技術が宇宙へ
最後のテーマは「宇宙での自動化・自律化技術が地球上でのビジネスに与える影響は」。つまり宇宙と地球での技術サイクルみたいなものを作ることで、自分たちのビジネスにできるのかということだ。
大塚氏は「宇宙システムのなかで成立するリソースのものであれば、地上でもコンパクトなところで回せるはず」と述べた。そして個人的な持論として「月では探査するだけではなく生活拠点設立を目指す。では人の生活とはどういうものか。今の宇宙で使われている技術だけではすまないはず。あらゆる技術が宇宙に進出する可能性がある。産業界の人はぜひ宇宙を目指してほしい」と語った。
伊東氏はエクサウィザーズの予想学習技術への取り組みについて改めて触れ、「人の生活の根幹のところが非常に多かった。タオル折りたたみとか料理とか、チャックを操作するとか、人は意識せずにやっているけれど、ロボットには難しいところ。人がやってきたことを月やISSでロボットができるようになれれば」と述べた。
山口氏は「宇宙環境とはいっても船内環境は作られたところ。可能性はあると思う」とコメントした。
最後に伊東氏は「意外と身近なところに技術の種はあるんだなと思っている。その小さな種がもしかしたら月に行くかもしれない。皆さんもぜひ取り組んでもらえるといいと思う」と呼びかけて締めくくった。ちなみに後ろ3つのテーマはChatGPTに考えてもらったものだったそうだ。
このあと質疑応答でも多くの質問が寄せられた。まだまだロボットを使った搬送や作業のニーズは高く、ISS船内は空間が限られているので容積率についてはシビアであること、シミュレータによる事前確認は必須であること、NASAの大型アームが動くとISS全体が振動するため他の実験のスケジュール調整が必要になることなどが紹介された。
また、「JAXAイノベーションハブ」でも技術募集しているので是非情報提供してほしいとのことだった。
■動画
ロボットの見方 森山和道コラム
株式会社エクサウィザーズ 公式サイト