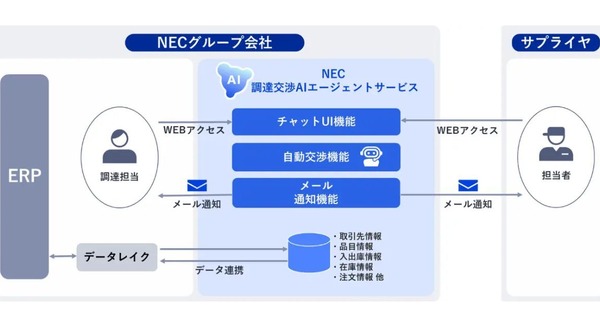


NECは、5Gを利用するユーザ端末の状況に応じて無線アクセスネットワーク(Radio Access Network:RAN)を動的に制御することで、ロボットや車両の遠隔制御といったアプリケーションの生産性を飛躍的に向上させる、RAN自動最適化技術を開発した。
NECは今後、実証実験を通して本技術の開発を進め、RANを高度に制御するRAN Intelligent Controller(RIC)に搭載し、2025年度内に実用化することを目指すとしている。
通信遅延の発生が導入の障壁
産業の現場における労働力不足の解消や生産性の向上を目指して、5G、AI、Internet of Things(IoT)などの最新技術を様々なシーンで活用し、デジタルトランスフォーメーション(DX)を推進する気運が高まっている。これらの技術をロボットや車両の遠隔制御で活用する場合、各ロボット・車両の状態監視と制御指示からなる双方向の通信を一定時間内で完了させる必要があるが、通信遅延が要件を超えると安全のため稼働を一時停止し、復旧後に再稼働するといったことを繰り返すため、稼働率や生産性が低下する。このため、無線品質の低下による再送遅延や、無線回線の混雑によるキューイング遅延(輻輳遅延)といった通信遅延の発生が導入を妨げる障壁となっていた。
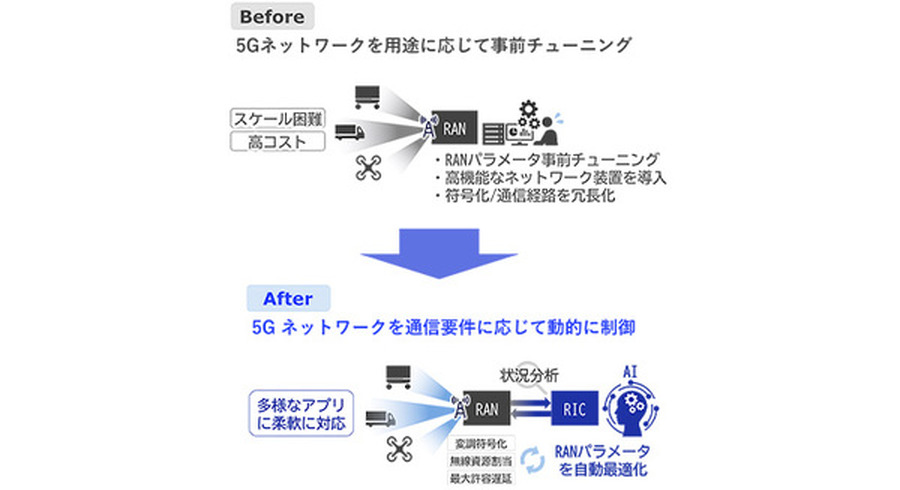
これに対し従来は、高機能なネットワーク装置を導入し、周波数資源を十分に用意して符号化や通信経路の冗長性を高め、RANパラメータを用途に応じて事前チューニングするなどして安定した通信環境を実現していた。しかし、これらの方法ではDXの進展で多様化するアプリケーションに広く対応することが難しく、導入に時間・コストを要することも課題となる。
開発したRAN自動最適化技術について
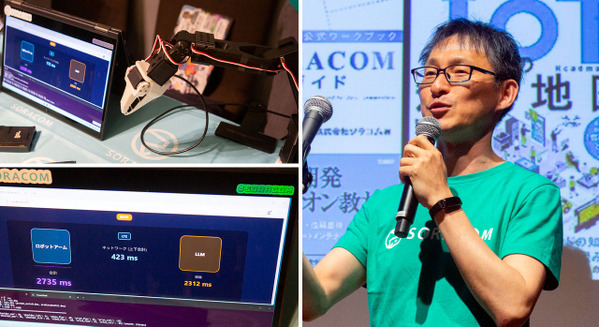
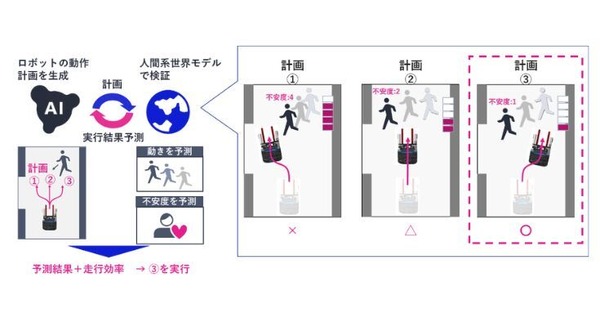
今回NECが開発したRAN自動最適化技術は、ロボットや車両などのユーザ端末単位で通信要件や無線品質の変動を分析するAIと、その分析結果に基づきユーザ端末単位でRANパラメータを動的に制御するAIで構成されている。これらのAIは、ロボットや車両などの過去の稼働実績を学習しており、通信遅延の要件を超過する確率を予測しながら変調符号化方式、無線資源割当、最大許容遅延などのRANパラメータを最適に制御。通常の5Gネットワークでは、RANパラメータをネットワーク全体で固定して設定するのに対し、本技術はユーザ端末単位で動的に制御してアプリケーションの生産性を向上する。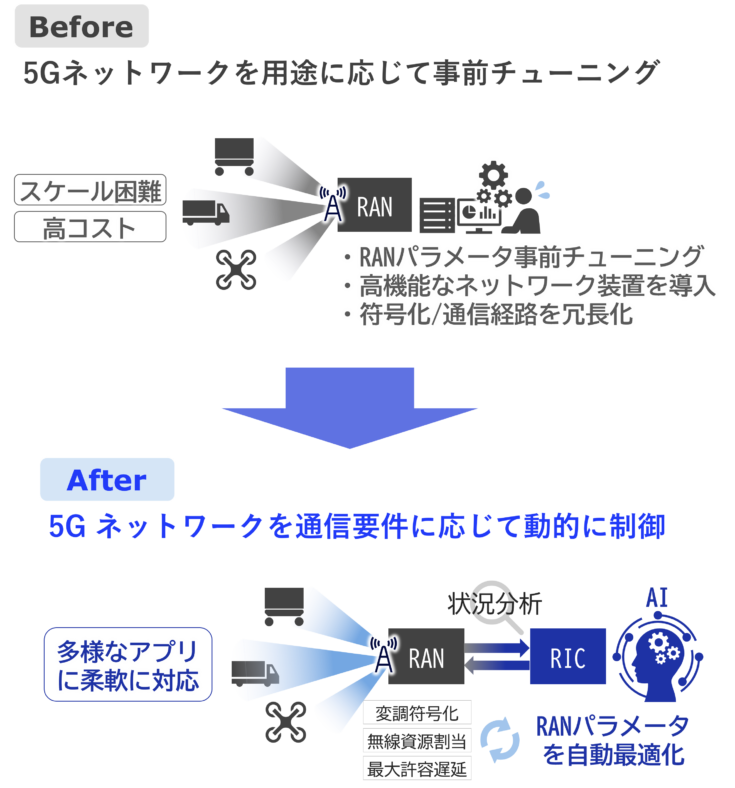
1:多様なアプリケーションに柔軟に対応
アプリケーションの通信要件に応じてRANパラメータを動的に制御でき、多様なアプリケーションが混在する環境においても全体最適化が可能。
2:O-RAN Allianceに準拠し、容易に導入可能
O-RAN Allianceの標準仕様に準拠したRICに搭載できるため、導入や既存設備への追加が容易です。
3:産業の現場で飛躍的な生産性向上が可能
本技術を、工場や倉庫で稼働する複数の自律走行ロボットを遠隔制御するシステムに適用したシミュレーションを行った結果、本技術を活用しない場合と比較して、ロボットの停止回数を1/50以下に削減できることを確認した。
今後の展開
NECは2024年度内に、本技術を用いた実証実験を行う予定。その後も開発を進め、O-RAN Allianceの標準仕様に準拠したRICに搭載し、2025年度内に実用化することを目指す。
なお、NECは本技術を2024年2月26日~29日にスペイン・バルセロナ・Fira Gran Viaで開催される世界最大のモバイル関連展示会「MWC Barcelona 2024で展示する。
【世界初】ドコモら、エリアや時間を指定したネットワークスライシングの実証実験に成功 AWSで構成、5GCと5G SAの商用無線基地局を利用
NVIDIAとNTTドコモ、GPUアクセラレーテッド5Gネットワークを国内展開 オープンRANを世界に先駆け構築
NECと富士通、ポスト5Gに向けたO-RAN仕様の異なるベンダーの基地局装置の検証を大幅に効率化、30%以上短縮に成功 NEDO
【世界初】ドコモ/KDDI/ソフトバンク/楽天モバイル、共同体制で国際規格「O-RAN」試験・認証拠点「Japan OTIC」をYRPに開設
日本電気株式会社