■外部軸としては国内初の「UR+」製品
■オリエンタルモーター「中空ロータリ―アクチュエータ」とは
■URティーチングペンダントから外部駆動旋回軸を直接制御可能に
■ユニバーサルロボットと「UR+」の現状
■外部旋回軸をPLCレスで直接ワンストップ制御
■中空ロータリーアクチュエーター「DGⅡ」シリーズ
■今後は他のアクチュエータも協働ロボット向けに展開
■「アーカックス」の頭部にも用いられている中空アクチュエーター
■外部軸としては国内初の「UR+」製品
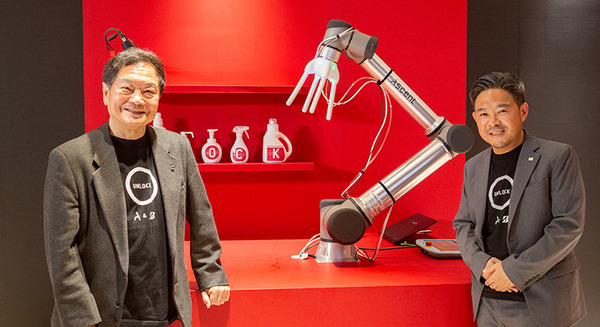
精密小型モーターおよび制御用電子回路などの開発・製造・販売を手がけるオリエンタルモーター株式会社と協働ロボットメーカーのデンマーク・ユニバーサルロボット社は、2024年4月15日、同社が開発・製造する中空ロータリーアクチュエータ「DGⅡ」シリーズが、ユニバーサルロボット製協働ロボットの周辺機器プラットフォーム「UR+」製品として認証されたと発表し、同社つくば事業所にて、合同で記者会見を行った。搬送・検査工程のターンテーブル旋回軸として使われるモーターを、ワンストップでロボットから直接制御することが可能になった。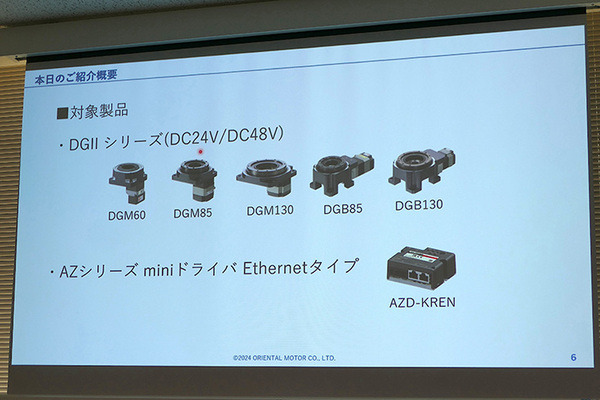
UE独自のティーチングペンダント上 GUI「PolyScope(ポリスコープ)」5.12.2以上に対応する。「UR+」としては日本では19社目の開発パートナーとなり、外部軸としては国内初の「UR+」製品となる。またオリエンタルモーターとしては協働ロボット向け製品開発は初めてで、協働ロボット市場への本格参入開始となる。プレスリリースはこちら。
■オリエンタルモーター「中空ロータリ―アクチュエータ」とは

精密モーターおよび電子制御を手がけるオリエンタルモーターは、1885年に電気器具、医療機械の製造・販売業として創業。1909年に1/8馬力単相整流子電動機の試作に成功し、これがモーター技術開発の出発点となる。
1953年、社名を東洋電動機株式会社からオリエンタルモーター株式会社に改称。FA、半導体、医療機器、食品・計量・包装機械など幅広い産業向けにモーターを提供し続けている。従業員数は2024年3月末時点で連結で3,042名。製品数は約5万種類。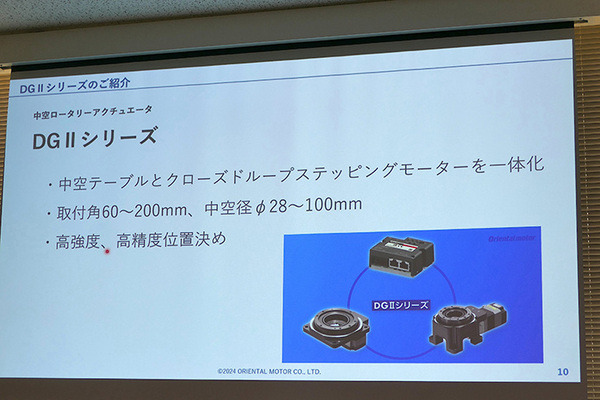
「DGⅡ」シリーズは、中空回転テーブルとクローズドループステッピングモータを一体化したロータリーアクチュエータ。出力テーブルに慣性モーメントの大きいテーブルやアームなどを直接取り付けることができるので、連結部品(カラー)が不要になり、設計や組付けの手間、部品コストの削減が図れる。
クロスローラーベアリングの採用により最大許容トルクは24N.m、許容アキシアル荷重は2000Nと約200kgまでの高荷重のワーク駆動を実現する。引き回しが複雑なケーブルの配線や、エアーや液体の配管に利用できる。取付角は60-130mmと高精度な位置極めが可能。主に半導体、電機電子、自動車、三品(食品、医薬品、化粧品)業界などで、部品や製品の搬送・検査工程のターンテーブル旋回軸として使われている。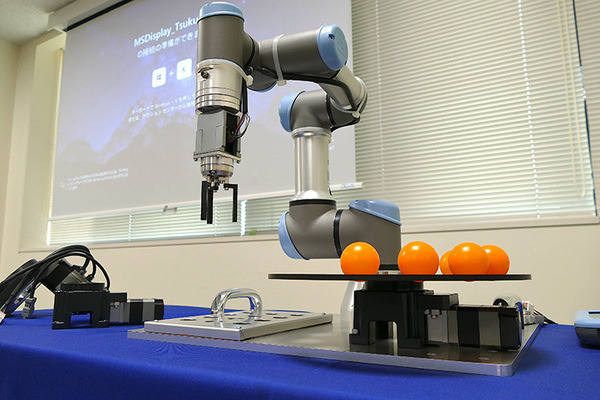
■URティーチングペンダントから外部駆動旋回軸を直接制御可能に
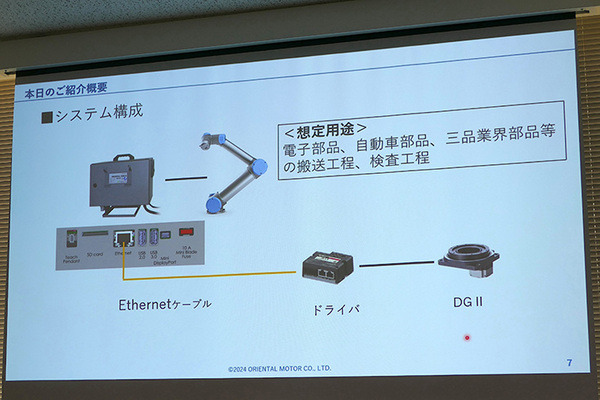
アクチュエータとドライバ、ケーブルを接続した後に、指令角度と速度を設定して運転を開始する。URロボットに接続された周辺危機を操作・設定するプラグインソフト「URCap」に対応し、URのティーチングペンダントで、ロボットとロータリーアクチュエータの通信設定や、位置や速度のパラメータ設定、ロボットと連動した動きの制御設定が可能。
従来は外部軸をロボットと連動させるには、外部にPLCが別途必要だったが、「DGⅡ」シリーズでは必要なくなった。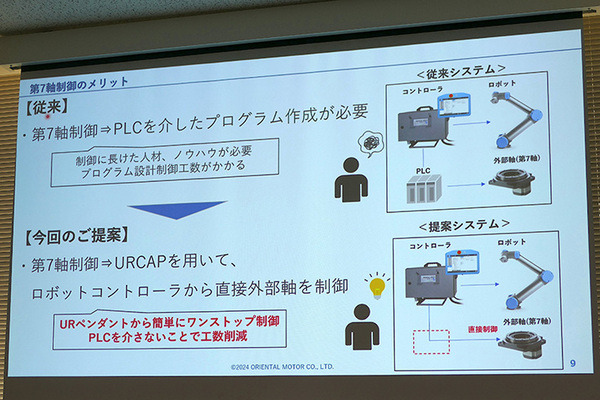
■ユニバーサルロボットと「UR+」の現状

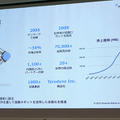
会見ではまず、ユニバーサルロボット 日本支社 代表の山根剛氏が同社の概要と「UR+」の状況について紹介した。2005年にデンマークで創業された同社は、現在はTeradyne社を親会社とし、協働ロボットの販売台数は75,000台を超えている。ビジョンは「人がロボットのように働くのではなく、ロボットと一緒に働く世界を創造するために」。昨年2023年にはiREXで可搬重量30kgの「UR30」を発表した。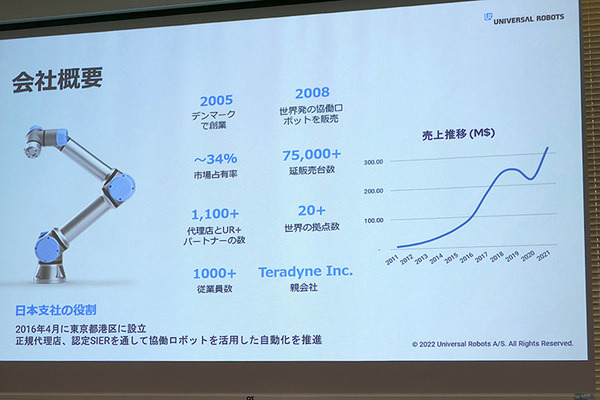
2024年5月には同じくTeradyne傘下の搬送ロボットのMiR社とURが一緒になった「Teradyne Robotics Group」の新本社が協働ロボットとAMRのハブとして竣工する予定。現在は可搬重量3kgから30kg、またリーチの長さの異なるタイプの製品をラインナップしている。山根氏は「重たいワークは体の負荷になる。その労働負荷を下げるロボットのニーズは高い」と述べた。なお最新世代は6世代目の「eシリーズ」。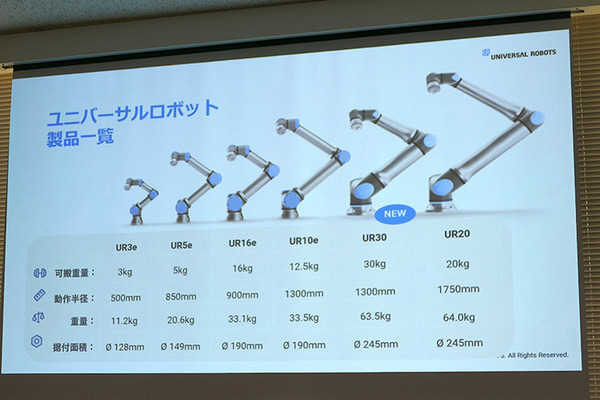
協働ロボットは搬送や溶接以外の様々な用途に用いられている。そのなかで同社の強みとなっているのが、オープンプラットフォーム「UR+」だ。周辺機器を開発・販売するパートナー企業とのエコシステムを為している。電気・メカのインターフェイスがURロボットに最初からカスタマイズされており、UIを同社のティーチングペンダント上の GUI「PolyScope(ポリスコープ)」にアドオンすることで、そのなかで複数の製品をインテグレーションできる。システム全体のインテグレーションの手間を引き下げ、費用を下げる効果がある。システムインテグレーターに外注しなくても、顧客が自分でシステムを組むことも比較的容易になる。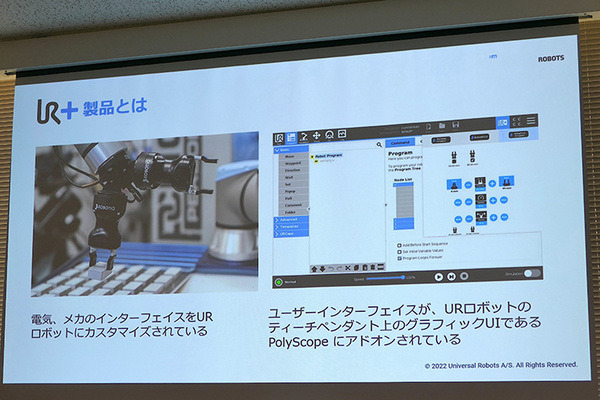
同様のエコシステム形成の動きは他社にもある。山根氏は同社独自の強みとして「認定製品が500近くある。海外含めて対応製品が多く、選択肢が多様」とアピールした。また各UR+製品の機能のペンダントへの組み込みやすさについては他社よりも優れているという。
「UR+」開発希望者はデベロッパーフォーラムに入り、SDKを含む「スターターパッケージ」をダウンロードすることになる。メーカーやSIerだけではなく、学生もいるとのこと。
■外部旋回軸をPLCレスで直接ワンストップ制御

オリエンタルモーター 機構商品事業部 事業部長の長谷川洋史氏は「UR+認証によって協働ロボット市場に本格参入できることを、とても嬉しく思う」と挨拶。同社のモーター提供先も時代に合わせて変わってきたことを実感しているという。「世の中では自動化が推進しており、ロボット市場も拡大している。オリエンタルモーターとしてもロボットとの連携による自動化に貢献をしていきたいと考えて開発をスタートした」と語った。
高強度・高精度位置決めが可能な中空ロータリーアクチュエータ「DGⅡ」シリーズを「UR+」対応として選んで開発した理由は、ロボットと外部周辺機器の旋回軸の連携が従来はできていなかったことと、中空軸を持つ製品は他と比べて特徴があると考えたためだという。今回の装置は、デスク上で何かしらのアクションを起こすようなケースに適用されるのではないかと考えていると述べた。
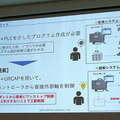
繰り返しになるが、従来は外部軸を動かすためにはPLCを介したプログラム作成が必要だった。そのためには制御に長けた人材やノウハウが必要で、プログラム設計制御の開発工数がかかる。今回はプラグインの「URCap」を用いて直接外部軸制御することで、URのティーチングペンダントから簡単にワンストップ制御ができるようになる。ユーザーにとってはPLCを介さないことが大きなメリットとなる。
■中空ロータリーアクチュエーター「DGⅡ」シリーズ
「DGⅡ」シリーズには回転テーブル軸とモーター軸が並行に組みついたタイプ(モーター縦方向)と、回転テーブル軸とモーター軸が垂直に組みついたタイプ(モーター横方向)がある。型番「DG」のあとのアルファベットが「M」がモーター縦方向タイプで、「B」がモーター横方向タイプだ。そのあとの数字は取付角を示す。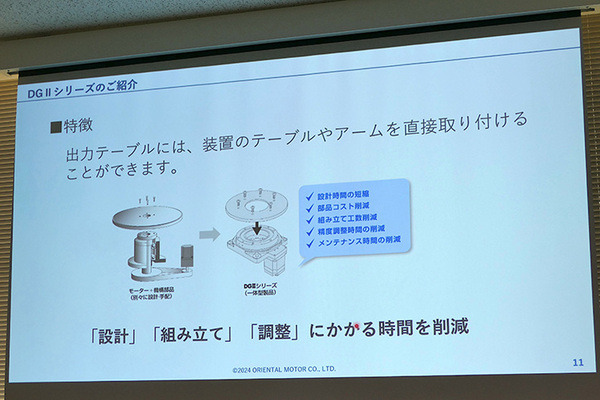
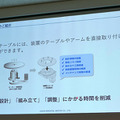
特徴は4つ。まず、中空軸の出力には装置テーブルやアームを直接取り付けることが可能で、設計を簡単化することで組立てや調整にかかる時間を短縮できる。二つ目の特徴はクロスローラーベアリングの採用で高出力駆動ができること。これにより中空径も大きく取れる。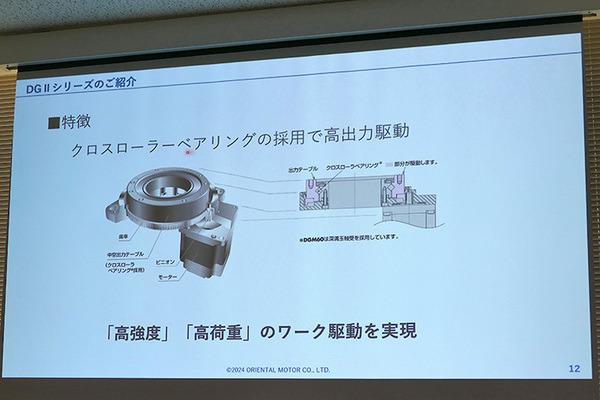
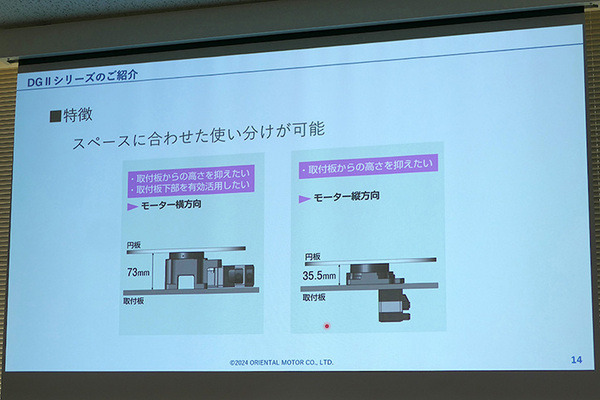
3つ目はその中空穴を使って、たとえば液体充填装置などを通すような配管設置も可能であること。省配線、配線工数の削減に貢献する。4つ目はスペースに合わせた使い分けが可能であること。取付板にポン付けで設置でき、モーター部分は「取付板からの高さを抑えたい」とか「板下部容積を有効活用したい」といった用途に応じて、商品を選ぶことができる。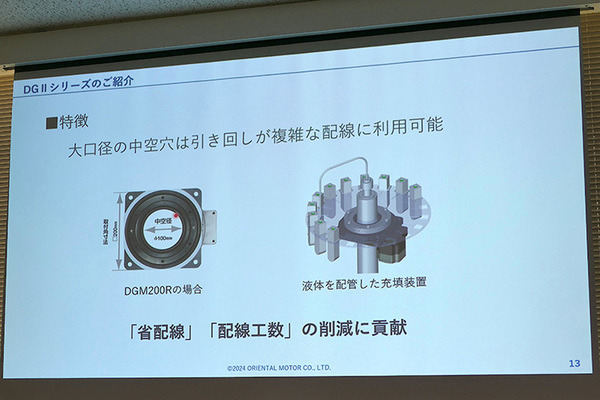
駆動モーターは「αSTEP AZ」シリーズを搭載。このモーターは、後ろ側にバッテリレスのアブソリュートセンサーを内蔵。位置情報を機械的に管理するので、リミットセンサなどの外部センサーが不要。またクローズドループとオープンループ制御を融合させており、モーター位置を常時監視しながら、状況に応じて二つの制御を自動で切り替えることができる。過負荷時は即座にクローズドループによる制御に切り替わることで、急激な負荷変動や急加速でも運転を継続させるといったことができる。
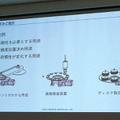
用途例としては負荷モーメントがかかるため高剛性が要求される用途や、画像検査装置のように高精度位置決めを必要とするもの、またディスク製造装置など負荷慣性モーメントが変動するような用途が考えられると述べた。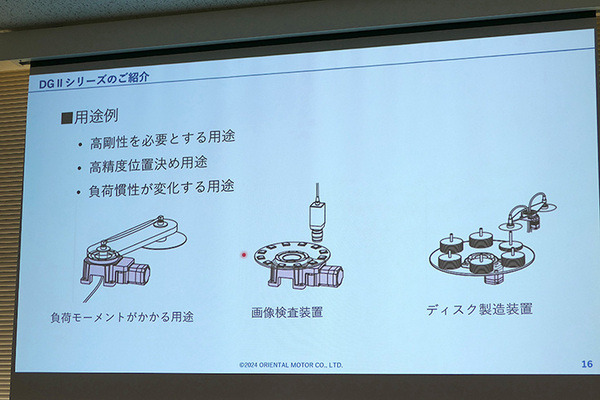
■今後は他のアクチュエータも協働ロボット向けに展開
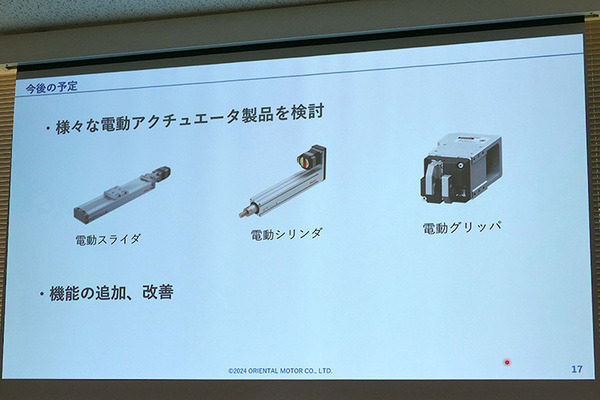
今後については「DGⅡシリーズ以外にも各種電動アクチュエータ製品を持っている。自動化ニーズに対応できるよう商品展開を積極的に考えたい。市場からの要望やニーズに応じて商品ブラッシュアップを進めていきたい」と語った。
■「アーカックス」の頭部にも用いられている中空アクチュエーター

主に産業用に用いられているオリエンタルモーターの製品だが、変わった適用例としては、ツバメインダストリ株式会社の搭乗操作型4m級ロボット「アーカックス」がある。オリエンタルモーターは「アーカックス」協賛スポンサーの一つだ。
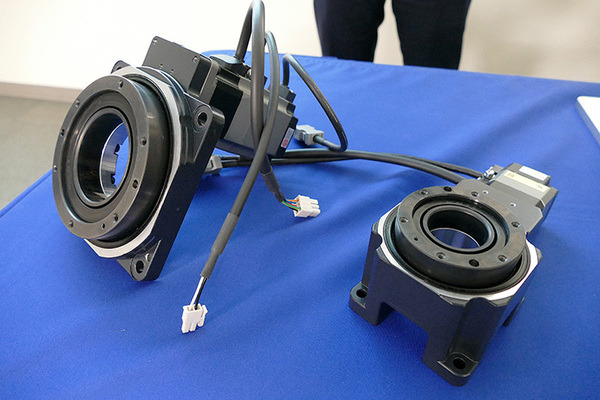
「アーカックス」の頭部旋回軸には、今回の話題である中空アクチュエーター「DGⅡ」シリーズが用いられている(DGB130R36-AZACL)。そのほか、手首にはアブソリュートセンサー内蔵のモーター「AZM66A1K」、指には電動シリンダー「DRSM42-04A2AZAK」が使われている。
同社は「あまり完成品の在庫は持っていない」とのことで、同等製品を見せてもらった。「アーカックス」頭部には実際にはモーターが横についている「DGB」タイプが使われているが、径自体は写真左の大きさのものが使われているとのこと。
手首モーターについては実際に使われているモーターと同じもの。指に用いられている電動シリンダー用のアクチュエーターも写真の製品と、ほぼ同等品とのことだった。