デンマーク創業の協働ロボット最大手のユニバーサルロボット(UR)は、2024年7月4日(木)から7月6日(土)にかけて「Aichi Sky Expo(愛知県国際展示場)」で開催された「ROBOT TECHNOLOGY JAPAN 2024(RTJ2024)」(主催:ニュースダイジェスト社)に出展した。
他の展示会でもお馴染みとなりつつある可搬重量30kgの「UR30」を使った重量物搬送やパレタイジングパッケージ、高トルクねじ締め、モーションリブ社の「リアルハプティクス」技術を使った感触や力加減の伝わる遠隔作業アプリケーションのほか、RTJ2024では代理店の豊田油気と共同で、安全機能内蔵スライダーを活用したばら積みピック、リアルタイム3Dビジョントラッキングを、日本国内で初公開した。この二つについて紹介しておきたい。
■安全機能内蔵スライダを使ったバラ積みピッキング
*動画
安全機能内蔵電動スライダーを活用したばら積みピックのデモは、THOMSON社の「MovoTrak(ムーボトラック)」という協働ロボット搬送ユニット(Cobot Transfer Unit : CTU)を使ったもの。動作中に本体あるいはスライダーに接触して外力を検知すると、安全のため停止する。衝突検出設定はユーザーが調整可能。
「UR30」を含むURロボット全機種に対応する。水平動作範囲は最大10m。繰り返し精度は±0.025mm/m。UR社が認証するロボットとシームレスに組み合わせて使える周辺機器の製品群「UR+」対応製品で、ティーチングペンダント上で動作や安全機能の感度などを設定できる。また、手動で移動させて直線的なウェイポイントの設定も可能。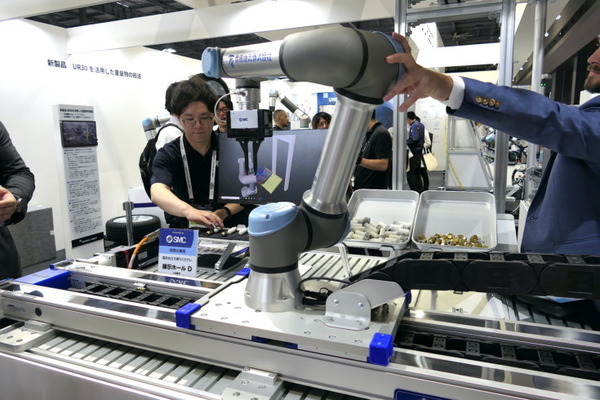
ブースのデモでは、ロボットパス演算機能を内蔵したMech-Mindの3DカメラとSMCのハンドを使った、ティーチングレスのピック&プレイスを行っていた。そのほか、マシンテンディングや半田付け、溶接などを想定用途としている。スライダーの活用はロボットの生産性を大きくあげることができるため、ニーズが高い。
■ワーク位置や向きが変わっても対応できるリアルタイム3Dビジョントラッキング
*動画
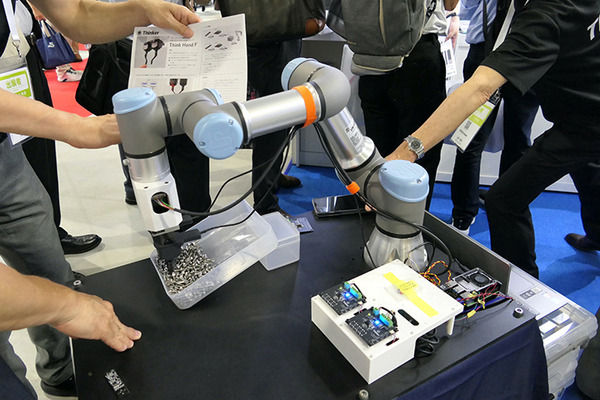
リアルタイム3DビジョントラッキングはINBOLT社の3Dマッチングビジョン技術「Inbrain」を使ったもの。手先につけた3Dカメラと認識AIを使って、ワークの動きに追従する。コンベア上にワークを流しても、コンベアそのものの信号は使わずに、ワークの動きだけを見て追従し、「ネジ締め」や「塗布」のような作業が可能になる。
3Dビジョンで取得した情報を独自のAIアルゴリズムで処理している。センサーで取得したデータと、事前に入力されたCADモデルまたは3Dモデルのデータをリアルタイムでマッチングする。設定等は「GuideNOW」というウェブアプリで行う。
大きな特徴は、ワークの位置や向きも認識して、それに対してロボットアームの動きをリアルタイムに生成すること。点群生成から目標座標生成までのレイテンシは80ミリ秒。水平方向だけではなく、深さ方向にも追従できる。照明条件の変化に強く、外乱光の影響も受けづらいロバストなシステムだという。
これも「UR+」対応製品で、容易にプログラミングができる。URによれば、AIトレーニング込みでプログラム設定は20分程度で済むという。
用途は、前述のコンベア上を流れるワークに対するネジ締めや塗布のほか、バリ取り、研磨、ピック&プレイス、アンローディングからパレタイジングなどを想定している。
*動画
■ロボットは、より簡単かつ柔軟なシステムへと進化中
ロボットにセンサーを取り付けるだけで、アームの軌道生成まで行える。しかも現場状況の変化に、柔軟に対応できるようになる。このような賢い自動化システムが容易に構築できる時代が到来していることは驚くべきことだ。「ROBOT TECHNOLOGY JAPAN 2024」参加者は実際の自動機械ユーザーばかりなので、実際の現場状況に基づいた商談が活発に行われていた。