

ソニーグループおよびソニー・インタラクティブエンタテインメントの発表したロボットの移動機構に関する論文が、2024年10月14日~10月18日にかけて、アラブ首長国連邦のアブダビで開催されるAI・ロボティクス分野のトップ国際学会「IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024」において採択された。これらは、ロボットの効率的な移動や様々な環境に応じた柔軟な動きを可能にし、自律移動ロボットの進化に貢献する研究成果であるとしている。
「IROS 2024」は米国電気電子学会(Institute of Electrical and Electronics Engineers/IEEE)と日本ロボット学会(Robotics Society of Japan/RSJ)が共催するロボット技術関連で世界最大規模の国際会議。
ソニーでは、「クリエイティビティとテクノロジーの力で、世界を感動で満たす」というPurpose(存在意義)の下、人々の創造性を解き放つ技術の創出を目指し、研究開発(R&D)を推進している。ロボティクスは、ソニーがR&Dにおいて注力している「AI」「センシング」「仮想空間」の3つの領域の技術を組み合わせ、社会実装につなげることができる応用分野の一つであり、今後も多分野に展開される基盤技術の研究開発と様々な技術領域の連動に取り組み、新たな感動の創出や持続可能な社会の実現に貢献していくとしている。
論文一覧
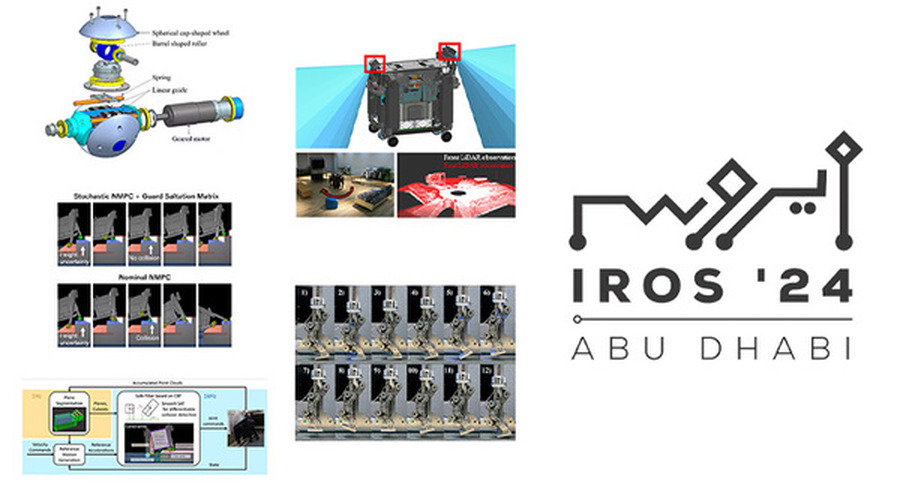
Development of Passive Transformable Omnidirectional Spherical Wheel(受動変形構造を持つ全方位球面車輪の開発)
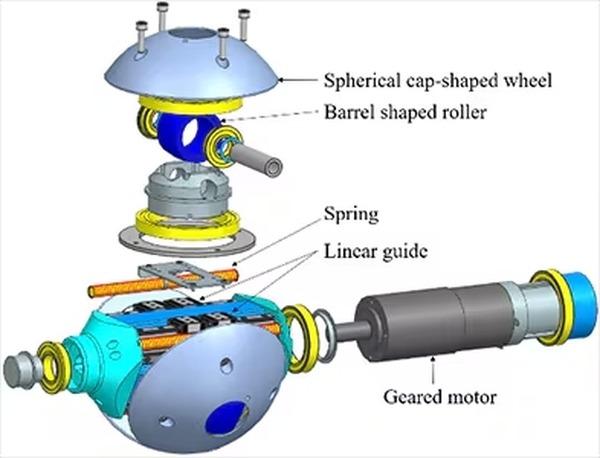
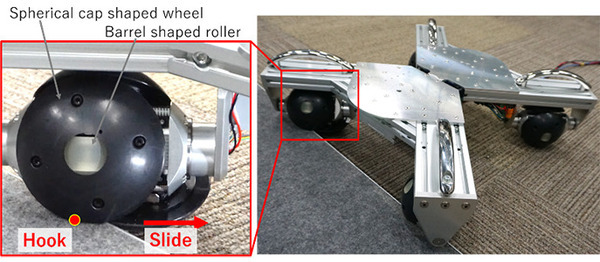
ソニーグループは、平地での車輪移動と不整地での脚移動を使い分けることで、高効率な移動を可能にする6脚車輪ロボットの研究に取り組んでいる。
車輪移動の適応範囲を広げるためには、凹凸や障害物などの段差を安定して踏破でき、十分な強度を備えた車輪機構を設計することが重要である。そこで、段差に当たると自動で形状を変え、安定して乗り越えることができるモーター内蔵型の全方位車輪(Passive Transformable Omni-Ball;PTOB)を独自開発した。
本技術は、ロボットだけではなく、車いすや台車などの車輪を搭載する移動体の進化に広く貢献する可能性がある。
なお、本論文は同学会における「Best Paper Award on Robot Mechanisms and Design」の最終候補にも選出されている。
| 著者 | 本郷一生 氏(ソニーグループ株式会社)、鬼頭隆志 氏、神川康久 氏、木下将也 氏、川浪康範 氏 |
|---|---|
| 参考URL | [2403.14160] Development of a Compact Robust Passive Transformable Omni-Ball for Enhanced Step-Climbing and Vibration Reduction |
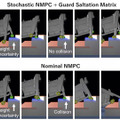
Robustifying Model-Based Locomotion via Zero-order Stochastic Nonlinear Model Predictive Control with Guard Saltation Matrix (跳躍行列とゼロ次確率非線形モデル予測制御を用いたモデルベース歩行制御のロバスト性向上)
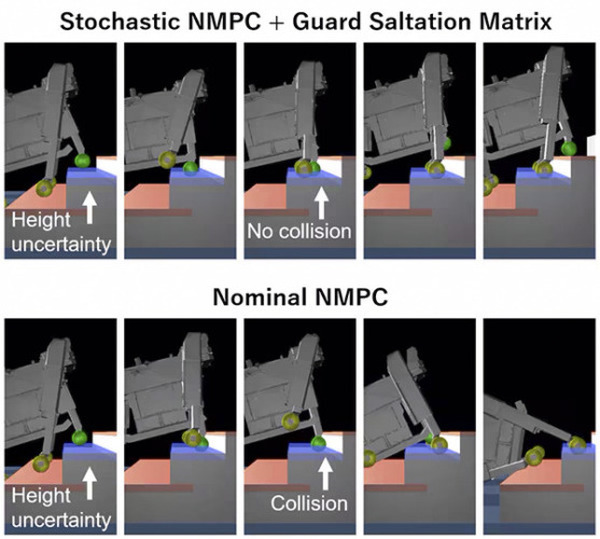
歩行ロボットは、周囲の環境認識に不確実さがある場合でも、安全に動作することが求められる。従来は、この不確実さを動作生成に織り込むことが難しく、試行錯誤をしながら様々な制御パラメーターをチューニングして、安全性を担保していた。
本研究では、「Guard Saltation Matrix」を用いてロボットと外部環境の接触における不確実さを事前に予測し、リアルタイムで動作を最適化する手法を開発。段差や地面の凹凸を正確には計測できない場合でも、ロボットが適切な脚の動きや接地位置を判断し、衝突や転倒を避けながら柔軟に自律移動できるようになる。
| 著者 | 片山想太郎 氏(ソニーグループ株式会社)、高杉憲明 氏、金子光久 氏、永塚仁夫 氏、木下将也 氏 |
|---|---|
| 参考URL | [2403.14159] Robustifying Model-Based Locomotion by Zero-order Stochastic Nonlinear Model Predictive Control with Guard Saltation Matrix |
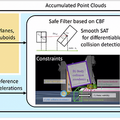
Real-time Perceptive Motion Control Using Control Barrier Functions with Analytical Smoothing for Six-Wheeled-Telescopic-Legged Robot Tachyon 3(直動6脚車輪ロボットTachyon3における解析的平滑化による制御バリア関数を用いた実時間認識統合運動制御)
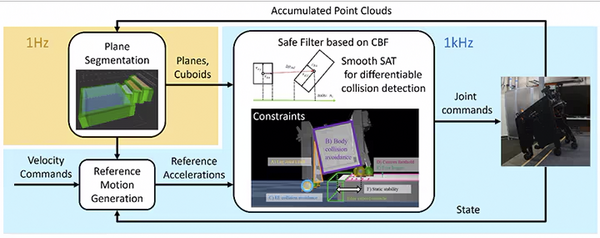
ロボットが様々な環境に対応しながら円滑に移動するには、リアルタイムで環境認識と最適な動作指示が行われる必要があるが、従来は、ロボットと物体の衝突を回避するための計算時間が課題だった。
そこで、新しい衝突検出技術「Smooth Separating Axis Theorem」を開発し、制御技術「Control Barrier Function」と融合させることで、ロボットが周辺環境との衝突や転倒を招かない安全な領域に脚を配置する動作を、高速(1ms以内)で生成することに成功した。
| 著者 | 高杉憲明 氏(ソニーグループ株式会社)、木下将也 氏、神川康久 氏、津崎亮一 氏、坂本篤之 氏、甲斐寿光 氏、川浪康範 氏 |
|---|---|
| 参考URL | [2310.11792] Real-time Perceptive Motion Control using Control Barrier Functions with Analytical Smoothing for Six-Wheeled-Telescopic-Legged Robot Tachyon 3 |
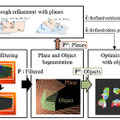
Multi-LiDAR Extrinsic Calibration for Mobile Robots Based on Floor Plane and Object Segmentation(床平面と物体セグメンテーションに基づく複数LiDARの外部パラメータキャリブレーション手法)
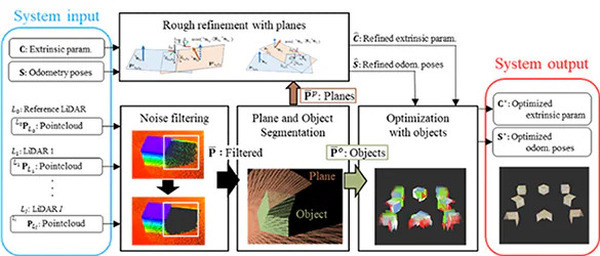
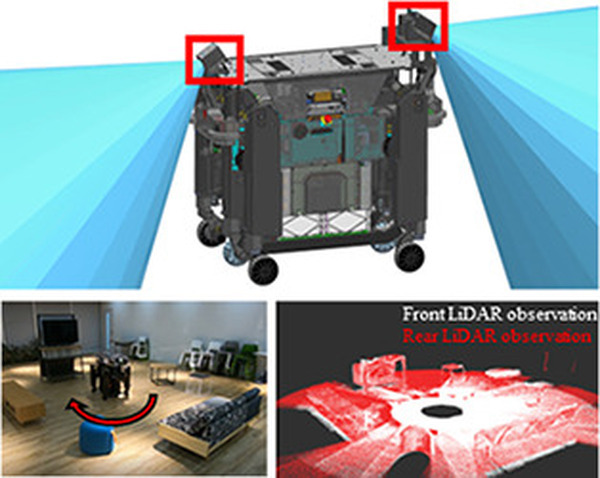
今後ロボットの活用が広がると、部品の交換などの定期的な機体のメンテナンスが必要になると予想される。
メンテナンス後もロボットの正常な動作を保つために、従来は、専用の道具を用いて個々のセンサーを誤差なく元の位置に戻す等の厳密な調整を要していた。そこで、特殊な道具を使わずとも、ロボットが周辺の床と物体の点群データをセンシングすることで、複数のセンサーの位置を同時に調整できる手法を開発した。
また、センサー間の視野重複が無い場合でも高精度のキャリブレーションが実行できるため、センサーをより自由に配置できるようになる。
| 著者 | 新島駿 氏(ソニーグループ株式会社)、鈴木惇之 氏、津崎亮一 氏、木下将也 氏 |
|---|---|
| 参考URL | [2403.14161] Extrinsic Calibration of Multiple LiDARs for a Mobile Robot based on Floor Plane And Object Segmentation |
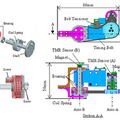
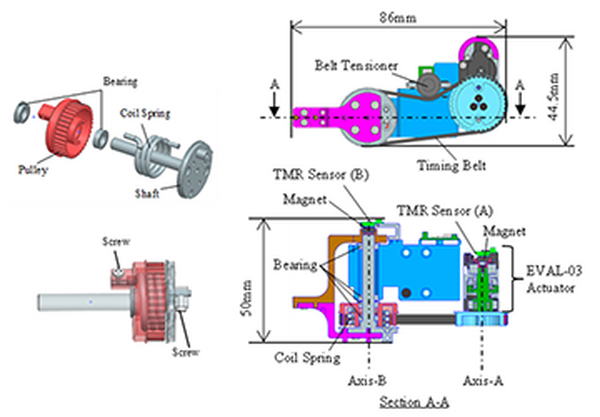
Development of Bidirectional Series Elastic Actuator with Torsion Coil Spring and Implementation to the Legged Robot(ねじりコイルばねを用いた双方向直列弾性アクチュエーターの開発と脚ロボットへの実装)
ソニー・インタラクティブエンタテインメントはロボットの新たな可能性を探索する研究に取り組んでいる。
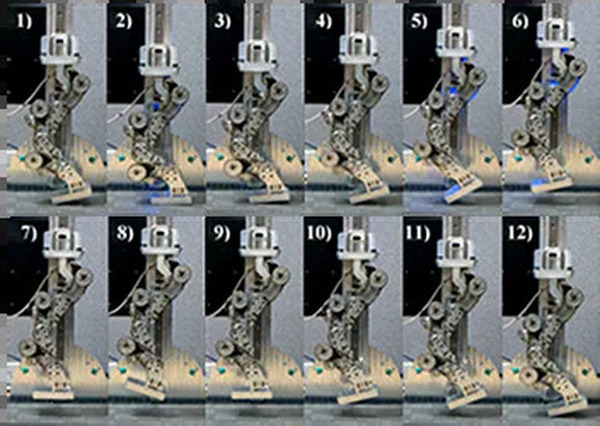
ロボットが走ったりジャンプしたり等の躍動感のある動きをするには、脚部の動力となるアクチュエーターの高出力化と着地時の衝撃吸収が求められる。そこで、ねじりコイルばねを用いた小型直列弾性アクチュエーターを新たに開発した。
実験では、同技術を搭載した1脚ロボットで、バネの弾性を生かした効率的な連続ジャンプ運動に成功した。
| 著者 | 香田祐太 氏(ソニー・インタラクティブエンタテインメント)、大澤洋 氏、永塚仁夫 氏、狩谷真一 氏、稲川妙子 氏、石塚健作 氏 |
|---|---|
| 参考URL | [2409.15791] Development of Bidirectional Series Elastic Actuator with Torsion Coil Spring and Implementation to the Legged Robot |


