

国立研究開発法人情報通信研究機構(NICT、エヌアイシーティー)は、ドローン同士がそれぞれの位置情報などを地上の操縦者やネットワークを経由せずに直接通信するシステムを開発。このシステムを応用して、先導するドローンに3機のドローンが一定の間隔を保って追従し、編隊飛行させる群飛行技術、及び同一の空域に4機のドローンが飛行しても自律的に相互の接近を回避するシステムの実証実験に世界で初めて成功したことを発表した。
同技術により、特に目視外まで飛行させる場合にドローン運用の効率化や電波の有効利用、及び空の安全・安心につながり、複数のドローンの同時飛行による物流や広範囲の農薬散布、災害対策など様々な分野への応用が期待される。
研究開発の背景と成果
近年、農業・測量・警備・物流・災害調査・点検など幅広い分野でドローンを活用する動きが活発化し、たくさんのドローンが空を飛び交う時代がすぐそこまで来ている。国の規制緩和も進み、今年度中には「小型無人機に係る環境整備に向けた官民協議会」が毎年取りまとめている「空の産業革命に向けたロードマップ」におけるレベル4と言われる有人地帯上空での目視外飛行も可能になる。
今回の研究開発ではドローン同士が特定小電力無線局である920 MHz帯の電波(出力20mW、上空利用可能、無線局免許不要)を使って相互にブロードキャスト通信を行いGNSSで得られた位置情報を共有する「機体間通信システム」を開発した。これを各ドローン上で飛行制御装置に接続することにより、ドローン同士が相互に連携することを可能にした。
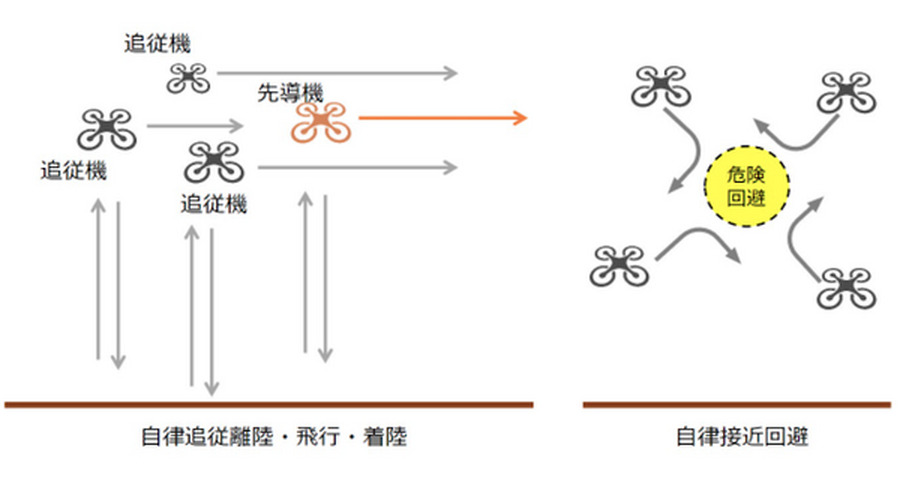
このシステムに「先導するドローンに対して他のドローンが自動で追従する群飛行(離着陸を含む)」や「自律的な接近回避」のための飛行制御アルゴリズムを組み込むことで、それぞれ4機での群飛行及び接近回避の飛行試験に世界で初めて成功した。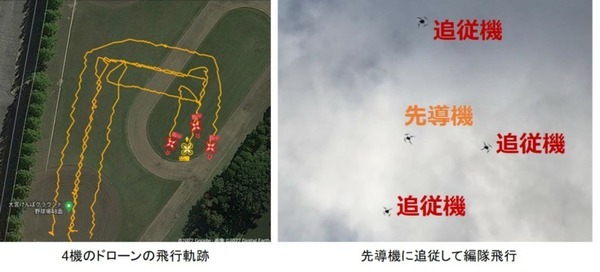

図1左のオレンジ色の線は各ドローンの飛行軌跡を示しており、黄色の先導機に追従して赤色の3機のドローンが編隊を維持しながら飛行できている。また、図2左が示すように、4機が方向を変えて接近を回避した後、図2右に示すように、予定していた経路にそれぞれ復帰することを確認した。
同システムはドローン間だけでなく、ドローンと有人ヘリコプターの間でも利用でき、数kmの距離を隔ててヘリコプターが接近した場合に、ドローンが自律的な接近回避をすることが可能になることも実証している。なお、今回の成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)が進める「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」の中の「遠隔からの機体識別および有人航空機との空域共有に関する研究開発」において実施した。
今後の展望
これらの技術によって、今後混雑が予想される上空での効率的で安全・安心なドローンの活用が可能となり、物流、農業、点検、防災といった様々なシーンでの利用が期待される。また、今回の成果を基に、更に多くのドローンが同一の空域内を飛行する場合に対応した通信制御方式や飛行制御方式についての検討や、飛行する環境に応じた編隊の隊形にするなどの群飛行技術や通信技術の高度化を進め、本方式の実用化を目指していく予定。
国立研究開発法人情報通信研究機構
