東京大学大学院情報理工学系研究科の竹内昌治教授らと早稲田大学理工学術院の森本雄矢准教授らによる研究グループは、培養骨格筋組織の収縮運動で動く二足歩行ロボットを実現したと発表した。この研究成果は将来のソフトロボットの開発や、生物学的な運動メカニズムの理解に貢献することが期待されるとしている。
概要
本研究では生体材料と人工物を組み合わせたバイオハイブリッドロボット技術を用い、培養骨格筋組織(筋肉の一種で、意志によって制御できる筋肉)の筋収縮運動によって「柔軟な足」を屈曲して動く二足歩行バイオハイブリッドロボットを世界で初めて製作した。
これまでのバイオハイブリッドロボットでは、匍匐(ほふく)移動や魚類を模倣したヒレによる泳動など様々な移動動作が達成されてはいたが、大回りの旋回動作しか行えなかった。本研究で実現した二足歩行ロボットは、ヒトの二足歩行運動で観察される細やかな旋回運動を再現することに成功した。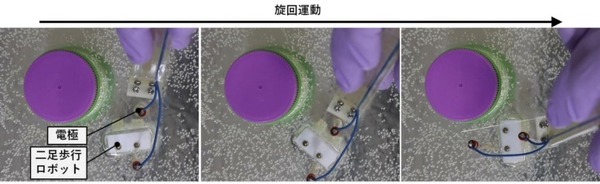
研究の背景
近年、生体由来の材料と機械部品を融合して製作されるバイオハイブリッドロボットが注目を集めている。その中でも、ロボットの駆動源に筋組織を用いた筋駆動型バイオハイブリッドロボットが盛んに研究されており、これまで、匍匐移動や魚類を模倣したヒレによる泳動など様々な移動動作が達成されている。
しかし、これらのロボットは、前に進みながら旋回する、大回りの旋回動作しか行えていなかった。そこで、本研究では細やかな旋回動作の達成を目指して、培養骨格筋組織の収縮運動で駆動する二足歩行バイオハイブリッドロボットを実現。この二足歩行ロボットは、2つある足のうちの一方を駆動足、もう一方を軸足に用いることで、ロボットボディの内側に旋回中心を設けることが可能になり、細やかな旋回動作が可能となる。
研究の内容
本研究では培養骨格筋組織を駆動源とする二足歩行ロボットを世界で初めて実現し、バイオハイブリッドロボットにおける細やかな旋回動作を達成した。
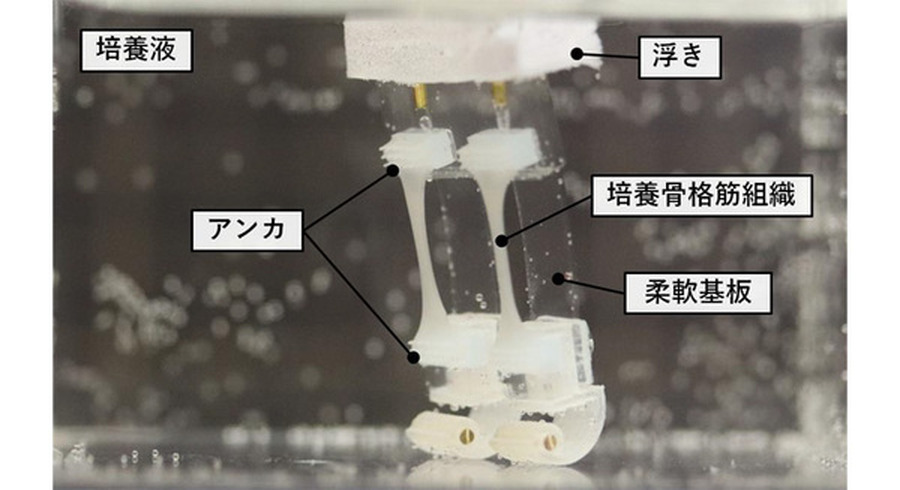
この二足歩行ロボットは、柔軟基板を有するポリジメチルシロキサン(PDMS:柔軟性と耐久性を持つシリコーン系の材料)製の足、歩行動作を実現するための重り、培養液中で直立姿勢を維持するための浮き、培養骨格筋組織から構成。この培養骨格筋組織に電気刺激を与えて筋収縮運動を引き起こすことで、PDMS製の足が屈曲し歩行動作が実現できるようになるだけでなく、重りが軸足の固定を可能にし、細やかな旋回動作が可能となる。実際、(ロボット長/回転半径)で示される回旋率は、従来ロボットが0.4であるのに対し、本ロボットではその5倍強である2.1を示した。
さらに、シミュレーションを通じて本ロボットの二足歩行メカニズムを解明するとともに、二足歩行による前進運動および旋回運動を実現し、実際に従来のバイオハイブリッドロボットよりも細やかな旋回が可能なことを示した。
今後の展開
この研究の成果は、筋組織を駆動源とするバイオソフトロボットの開発や、ヒトの歩行メカニズムの理解につながるとしており、薬剤添加時の運動改善効果解析や、薬剤と運動の組み合わせ時の薬剤効能解析、疾患骨格筋組織を用いた際には疾患時の病態解析まで様々な状態での運動モデルとして、薬学や医学分野で応用できると考えられている。




