NTTとNTT e-Drone Technologyは、熊谷市の道路橋においてドローンと画像認識AIを用いた鋼材の腐食検査の実証実験を2024年9月2日より開始した。
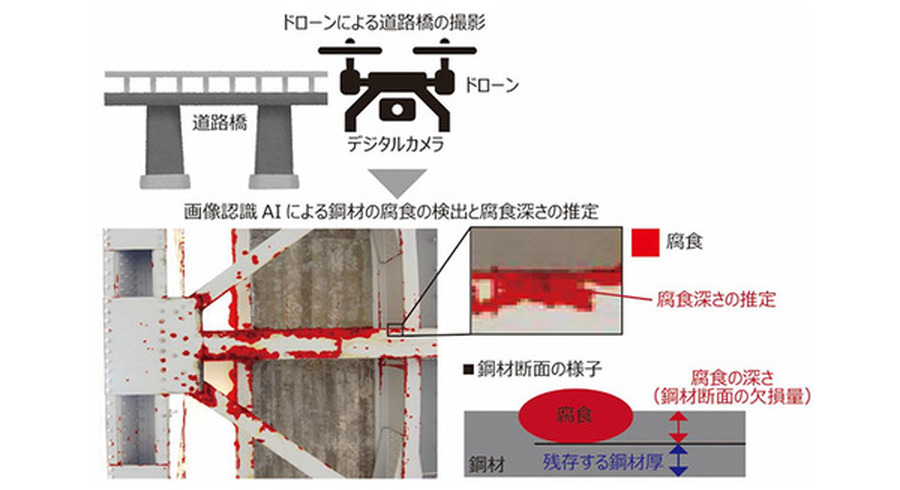
今回の実証実験では、道路橋点検のDXを目的としてドローンによって撮影した道路橋の画像からAIを用いて鋼材の腐食を検出し、腐食の深さ(腐食による鋼材断面の欠損量)を自動的に推定する検査方法の実用化に向けた検証を行う。これにより、現行では検査員が超音波装置を用いて計測していた腐食箇所の鋼材厚を画像撮影に置き換えられるため、点検作業の効率化による維持管理コストの縮減を実現するとしている。
背景
道路橋は私たちの経済や生活を支える重要なインフラ設備だが、これらの設備の老朽化はおおきな社会問題になっており、道路橋の老朽化を進行させる劣化要因のひとつに鋼材の腐食が挙げられる。鋼材に発生した腐食は進行に伴い鋼材の断面を欠損させるため、設備の耐久性能や耐荷性能は徐々に低下し、最終的には破損や崩壊につながる可能性があるため、設備管理者は腐食が発生した箇所の鋼材の厚さを把握することが重要である。
しかしながら、現行の点検方法では腐食箇所の鋼材厚を把握することは困難であり、現行では検査員が目視により設備の外観に発生した腐食を確認しているため、腐食の深さ(腐食による鋼材断面の欠損量)は把握できない。腐食が著しい箇所に対して超音波を用いて鋼材の厚さを計測する方法はあるが、探触子を計測箇所にあてる必要があり、設備全体では多くの作業コストを要すため実施は容易ではない。また、大型の道路橋の点検時には、足場設置等のコストが発生する場合もある。このような背景から国土交通省では効率的に道路橋の点検を進めるために、直轄国道では国土交通省が定める「点検支援技術性能カタログ」の技術を用いることを原則化しており、点検支援技術の導入を推進している。
そこで、NTTとNTT e-Drone Technology は道路橋の点検支援技術として、ドローンと画像認識AIを用いて鋼構造物の検査を効率化する方法を検討。本方法ではドローンで撮影した道路橋の画像から画像認識AIを用いて腐食を検出し、その箇所の腐食深さ(腐食による鋼材断面の欠損量)を自動的に推定する。ドローンを用いた画像撮影により大型の道路橋の点検時に必要な足場設置等のコスト削減に加えて、画像認識AIにより設備の腐食箇所の把握と鋼材厚の計測が簡単かつ低コストで実現が可能となる。
本方法の実用化に向け、2024年9月2日よりNTTとNTT e-Droneは熊谷市と連携し、熊谷市保有の道路橋を用いてドローンと画像認識AIによる設備検査の実用性の検証を開始した。
鋼材の腐食を検出し深さを推定
ドローンによって道路橋の画像を撮影し、画像認識AIを用いて鋼材の腐食検出と腐食深さの推定、および、作業能率や技術精度の検証を行う。
1:検証項目
・ドローンによる画像撮影と画像認識AIによる検査の作業時間
・画像認識AIによる鋼材の腐食検出率
(評価方法は、画像認識AIによって検出した腐食領域と専門の検査員が判断した腐食領域の一致率を確認。)
・画像認識AIによる腐食深さ(腐食による鋼材断面の欠損量)の計測
(評価方法は、画像認識AIによって推定した鋼材断面の欠損量と同一か所を超音波装置にて計測することで算出した鋼材断面の欠損量との比較を行う。)
なお、本検証で用いる画像認識AIはNTTが通信用管路で構築した腐食検出技術と鋼材断面の欠損量推定技術を道路橋へカスタマイズした技術を用いる。
2:実験期間
2024年9月2日~2025年2月28日まで
3:実用化に向けた検証ポイント
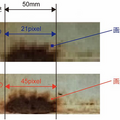
ドローンと道路橋の撮影距離を常に一定の距離に保つことは、高度な操作技術の必要性や橋の形状により飛行可能な空間の異なるため難しく、同一の腐食を遠写した場合と接写した場合に腐食箇所の画素分解能(mm/pixel)の差異が生じ、腐食深さの推定精度に影響を与えることが想定される。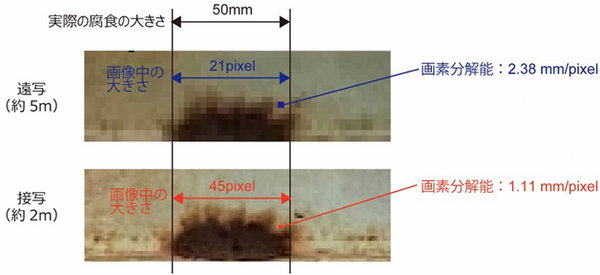
そこで、粗い画素分解能の画像からでも高精度に腐食深さを推定できるように画像認識AIをカスタマイズすると同時に、腐食深さの推定精度と画素分解能の関係性を明らかにし、運用時のドローンでの撮影条件(撮影距離・撮影機材等)を定めることで本検査方法の実用化をめざすとしている。
各社の役割
| NTT | 画像認識AIによる腐食検出と腐食深さの精度検証、画像認識AIのカスタマイズ、超音波装置による腐食箇所の鋼材断面の欠損量計測 |
|---|---|
| NTT e-Drone | ドローンと画像認識AIを用いた点検作業の能率検証、ドローンによる道路橋の撮影、ドローンの飛行時の撮影条件(撮影距離・搭載カメラ等)の検討 |
| 熊谷市 | 実証実験場所および道路橋の点検結果の提供 |
今後の展開
今回の実証実験結果から実用性を評価し、2025年度に点検支援技術として実地導入を予定している。さらに、道路橋のみならず、鉄塔、ガードレール等といった様々なインフラ設備への技術拡大を進めて、社会インフラ全体の維持管理コストの増加等といった課題解決により持続可能な社会の実現に貢献するとしている。
放流時に河川利用者を見回る広範囲な河川巡視にドローンとLTE通信を活用 NTTイードローンが効果検証を実施し十分な効果を確認
NTTがデジカメの画像で自動的に鋼材の腐食を検出・深さを推定する画像認識技術を確立 維持管理コストの縮減に
NTT コンクリート構造物の撮影画像から高精度に劣化を計測する技術を確立 インフラ設備点検の低コスト化の実現へ
公共設備の遠隔点検を無人地上車両「UGV」とドローン「UAV」を使って実証実験 センシンロボティクスと扶桑電通が成果を公表
能登半島地震復興に向けて「球体ドローン」による橋梁点検を輪島市内で実施 点検員の安全確保と橋梁の危険性を迅速点検 ブルーイノベーション