




NECは茨城県日立市と石川県小松市において、ローカル5Gを活用した自動運転レベル4を支援する通信システムの検証を開始すると明らかにした。茨城県日立市では2024年12月から、石川県小松市では2024年10月から開始する。
日立市は自動運転サービス支援道の先行導入地域に指定
近年、地方を中心に地域公共交通の維持・運転手不足などが課題となっている。この社会課題の解決に向けて自動運転の活用が期待されており、実用化に向けた取り組みが広がっている。政府においても、「デジタル田園都市国家構想総合戦略」の中で地域限定型の無人自動運転移動サービスを2025年度までに50ヶ所程度、2027年度までに100ヶ所以上の地域で実現する目標を掲げている。
茨城県日立市では、「デジタル田園都市国家構想総合戦略」中核に位置付けられている「デジタルライフライン全国総合整備計画」の「アーリーハーベストプロジェクト」にて一般道における自動運転サービス支援道の先行導入地域に指定されており、自動運転の社会実装に向けた取り組みを積極的に進めている。
小松市は小松駅と空港間をスマートに接続
石川県小松市は北陸新幹線小松駅と小松空港の間をスマートに接続する「レール&フライト」の拡大や、街中への人の流れを促進するために、自動運転バスの導入に取り組んできている。
この実証実験では、総務省の「地域デジタル基盤活用推進事業(自動運転レベル4検証タイプ) 」に基づき、安全・安心な自動運転移動サービスの実現に必要となる通信システムの要件について検証を行うことにより、自動運転の社会実装の早期実現に貢献するとしている。
茨城県日立市での実証概要
| 実施主体 | NEC、みちのりホールディングス、ティアフォー |
|---|---|
| 協力 | 日立市 |
| 実施時期 | 2024年12月上旬から下旬にかけて約1ヶ月間 |
| テーマ | 狭隘交差点における安全走行および遠隔監視の継続性向上の検証 |
| 実証内容 | 下記の通り |
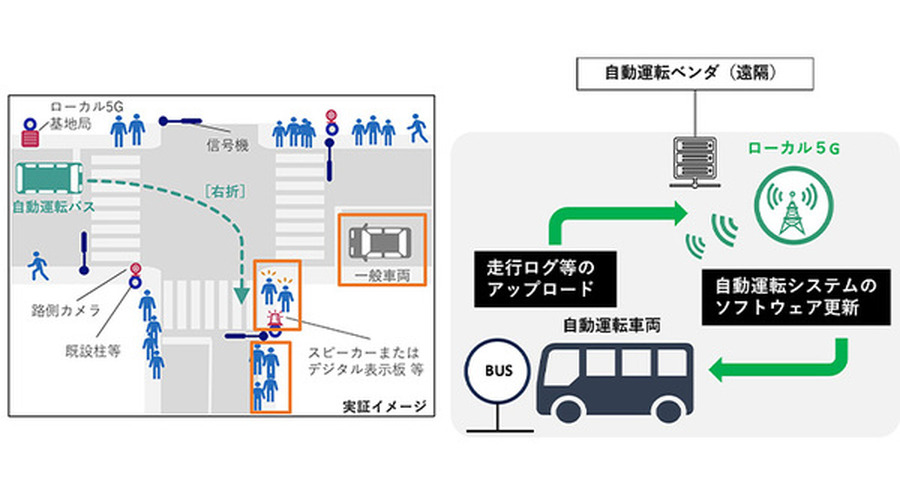
1:ローカル5G通信を活用した狭隘(狭い)交差点における歩行者と自動運転バスの安全離隔の確保
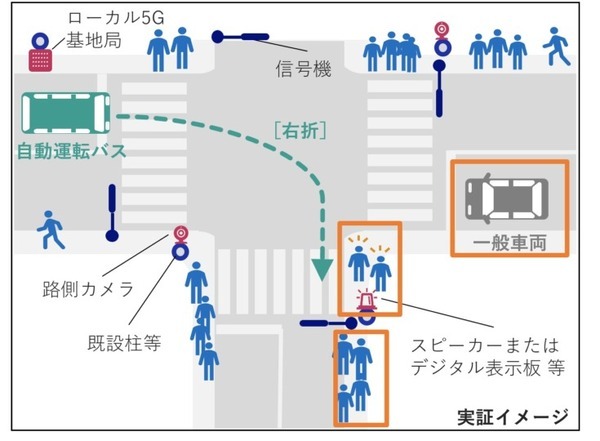
自動運転レベル4による走行時には歩行者と自車の間で安全な距離を確保することが重要となる。そこで、通勤時に多くの歩行者が利用する狭隘な交差点において、高度な通信システムを用いて自動運転の安全性向上を目指した実験を行う。
具体的には、通信システムに低遅延かつ安定的な通信が可能なローカル5Gを使用し、自動運転バスから路側のスピーカーに対して自車の右折動作と連動した発音を指示することで、歩行者に向けて的確に注意喚起をする。あわせて、路側のインフラシステムから自動運転バスに対して車道へ立ち入る歩行者や遠方から接近する対向車などの物標情報を通知することで、自動運転バスの物体認識を支援する。
2:携帯電話網の通信品質に応じた高度な映像圧縮技術による遠隔監視の継続性向上
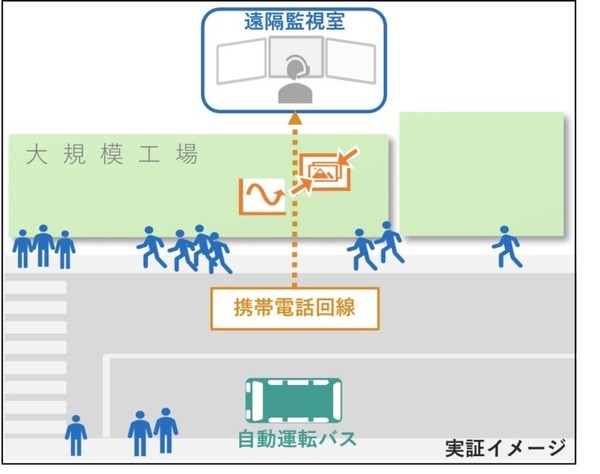
自動運転レベル4の走行時には遠隔による常時監視が不可欠であり、その際に映像伝送の継続性と高い映像品質の維持が重要になる。そこで、携帯電話網の混雑が予想される状況下において、高度な映像圧縮技術を用いた場合の映像伝送の継続性と映像品質について検証する。
具体的には、特に数千人規模の工場が隣接する走行区間において、通信速度を予測する技術を用いて携帯電話網の通信速度の低下を予測し、それにあわせて映像の圧縮率を事前に変更する。また、遠隔監視業務において注目すべき映像内の領域を自動で検出し、それ以外の領域の圧縮率を高めることで映像伝送量を削減する学習型メディア送信制御技術を活用する。このように、携帯電話網の通信品質に応じて適切な映像圧縮を行うことで映像伝送の継続性向上と映像品質の維持を目指す。
石川県小松市での実証概要
| 実施主体 | NEC、BOLDLY、ティアフォー |
|---|---|
| 協力 | 小松市 |
| 実施時期 | 2024年10月下旬から11月下旬にかけて約1ヶ月間 |
| テーマ | ローカル5Gを活用した高速大容量データ通信および高速走行車両検知技術に関する通信技術等の検証 |
| 実証内容 | 下記の通り |
1:自動運転システムのソフトウェアの更新短縮化
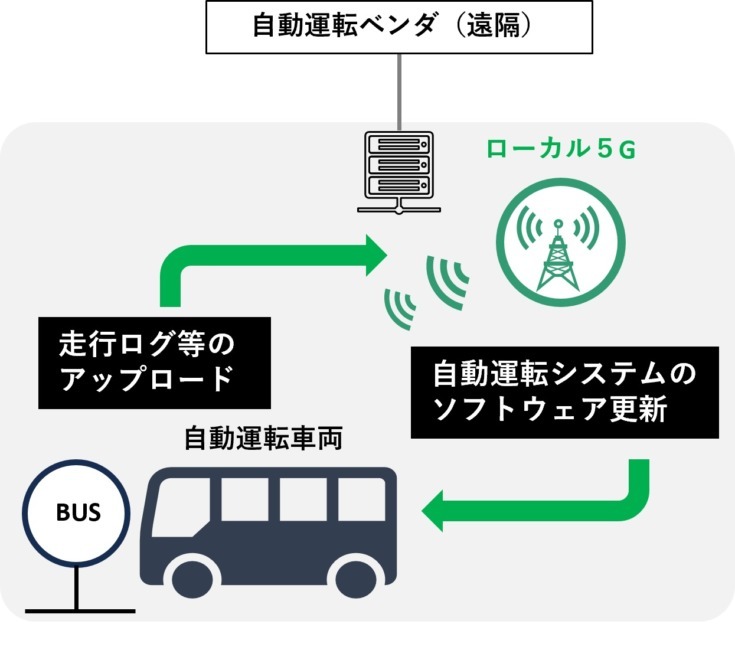
将来的な自動運転レベル4を見据え、バス停への停車時等において自動運転車両に搭載された自動運転システム内の副次的な情報の更新や、走行ログなどのアップロードを短時間で実行するため、大容量データの通信を効率よく行う技術の検証を行う。
具体的には、ローカル5Gを活用することで、小松駅~小松空港間の自動運転バスの運行ダイヤにおける、小松駅側での停車時間中に、上述の対応を完了できるかを検証する。
2:ローカル5Gによる走行車両の検知および検知情報の広域配信

無信号の丁字路において、車両の流れが速い交差側の遠方車両を検知して広範囲に情報を配信する技術の検証を行う。
具体的には、路側に設置したカメラによって交差点から最大300メートル程度の遠方車両を捉え、MEC(Multi-access Edge Computing)を用いて分析することで車両の位置や速度などの情報を物標情報に変換し、ネットワーク経由で周囲を走行する自動運転車両に配信する。
JR小松駅と空港を結ぶ自動運転バスの利用者が1万人を突破 「レール&フライト」拡大に貢献 自動運転レベル4の取組も進める
NECが全国5自治体と自動運転支援の路車協調システムの実証開始 ローカル5GやMEC、路側カメラ活用
NTTなど よこはま動物園ズーラシア地域で最新通信技術と自動運転バスの実証実験 遠隔監視や路車協調システムで車両制御を検証
NECやティアフォーら5者 沖縄県豊見城市で自動運転EVバス車両での運行開始 2025年度中に「レベル4」許認可取得を目指す
NTTがMay Mobilityと自動運転の普及に向けた取組み開始 自動運転シャトルなど定期運行を実施 愛知と東京調布で
NTTなど よこはま動物園ズーラシア地域で最新通信技術と自動運転バスの実証実験 遠隔監視や路車協調システムで車両制御を検証