米国で2026年3月16日から開催された「GTC 2026」において、ロボスタではNVIDIAのフィジカルAI担当者であるRev Lebaredian氏にインタビューする機会を得た。そこでは「ロボティクス」と「自動運転」の未来を大きく塗り替える重要な示唆が語られた。
その核心は「従来、参入障壁だった“膨大な実世界データ依存”が大きく緩和され、より多くの企業が参入しやすい時代になりつつある」という点にある。

これまでロボティクスや自動運転の分野では、「どれだけ大量の実世界データを持っているか」が競争優位を決めるとされてきた。しかし、今回の説明によれば、その前提自体が大きく変わり始めている。

AIの進化は単なる性能向上ではなく「開発の構造そのもの」を変えつつある。その変化は、ロボット産業のプレイヤー構造やビジネスの前提をも揺るがす可能性がある。
データ優位の崩壊 コンピュートがデータを代替する時代へ
従来、ロボットの知能化や自動運転で重要な「フィジカルAIの開発」において「膨大な実世界データの収集」と「長期間にわたる走行・運用ログの蓄積」が不可欠とされてきた。
特に自動運転では「どれだけ多くの車両を走らせているか」がそのまま競争力に直結していた。これは新規に参入しようとする企業にとっては極めて困難な構造でもあった。
しかしNVIDIAは、この前提がすでに崩れつつあると指摘する。
鍵となるのは「推論能力(Reasoning)の進化」と「シミュレーション技術の高度化」だ。
AIはまるで人間がそうしているように「見たこと」「遭遇した体験」をもとに学習できる。一方で「見たことのない状況(初めて経験する状況)」に遭遇した場合は対応ができない、対応が遅れるとされてきた。
Lebaredian氏は「AIが状況を要素ごとに分解し、類似した学習例をもとに推論して再構成できるようになった結果、従来ほど多様な実世界データを必要としなくなってきた」と説明した。

最新の技術においては、見たことのない状況に対しても、過去の類似パターンを組み合わせて判断できるようになってきたことを示していると思われる。これは、フィジカルAIの開発において、すべてのケースを網羅したデータの用意が必須ではなくなりつつあるということだろう。
重要なのは、コンピュート(計算資源)によってデータを“生成”できる点だ。
実世界から取得した少量のデータをシミュレーション環境に取り込み、そこから無数のバリエーションを生成することで、学習データを指数関数的に増やすことが可能になっている。
この結果、競争軸は「保有データ量」だけではなく、「コンピュートとシミュレーションをどう活用するか」に移りつつあると考えられる。
開発スピードの革命 現実の制約からの解放
もう一つの重要な変化は、開発スピードの飛躍的な向上だ。従来、移動型ロボットや自動運転での実機での実験には時間とコストがかかるとされてきた。「走行テスト」「環境再現」「検証サイクル」を繰り返す必要があったためだ。
しかしシミュレーション環境では、現実とは比較にならない速度で試行錯誤できる。例えば、現実よりはるかに高速な時間のスケールで試行錯誤ができる。Lebaredian氏は「現実の1分に対してシミュレーション世界では“数百万時間分”に相当する検証も可能」だと表現した。
これは単なる効率化ではなく、開発そのものの時間軸を根本から変えるインパクトを持っている。
その結果として「開発期間の大幅短縮、実験コストの低減、試行回数の爆発的増加」が同時に起きることになる、と指摘する。

AIは「ツール」から「労働者」へ
今回のブリーフィングで繰り返し強調されたもう一つのポイントが「Agentic AI(自律型エージェントAI)」の進化だ。
これまでAIは人間を支援する「ツール」だったが、Lebaredian氏は「今後は人間から独立して働ける"worker"に近い存在へ変わっていく」と説明した。

例えば、AIエージェントが以下をすべて自動で実行することができるようになる。
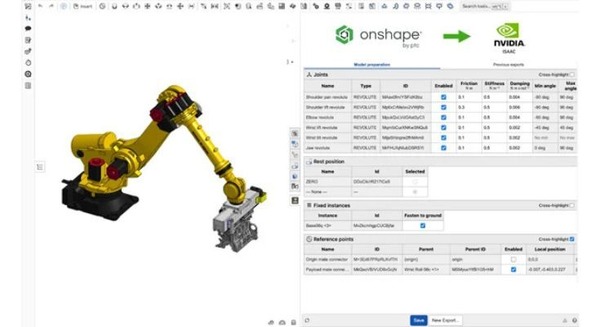
・CADツールの操作
・ロボット部品の設計変更
・シミュレーションの実行
・結果の評価と最適化
Lebaredian氏は「ロボットハンドのグリッパーを再設計し、コーヒーカップを掴めるように改良する作業が、完全にAIだけで完結できた」ことを例にあげた。
これは重要な意味を持つ。
従来、シミュレーション環境の構築は高度な専門知識を持つ人材(熟練者)に依存していた。しかしAIがその役割を担うことで、非専門家でもフィジカルAI開発に参入し、活用しやすくなる。
NVIDIAの戦略 ロボットを作らず「最大企業」になる
Lebaredian氏はNVIDIA自身の立ち位置をこのように表現した。
「NVIDIAはロボットそのものを作っているわけではないが、「AIコンピュータ」「シミュレーションコンピュータ」「エッジ側の推論コンピュータ」という3つの計算基盤を提供しており、ほぼすべてのロボティクス企業がそのいずれか、あるいは複数を使っている」と説明した。

この構造は、自動車業界におけるプラットフォーム企業とも異なり、例えるなら、いわば「フィジカルAI産業の基盤レイヤー」に近い存在といえるかもしれない。
Cosmosと世界モデル、物理世界版LLMの登場
筆者は、フィジカルAIのキーテクノロジーの一つは、ワールドモデル「Cosmos」(Cosmos世界基盤モデル)だと考えている。これは簡単に言えば、「物理世界版のLLM(大規模言語モデル)」といえる。
LLMが言語のパターンを学習するのに対し、Cosmosは「物理法則」「環境変化」「空間構造」を学習する。その結果、「世界の生成」「環境の変換」「未来状態の予測」が可能になる。
ChatGPTやGeminiなどのLLMは、文字や文章の次を予測することで対話としての最適解を生成する。フィジカルAIの「Cosmos」は「次の世界の状態」を予測するモデルという意味でLLMと同様のしくみだ。
Lebaredian氏は、Cosmosのような世界基盤モデルを、物理世界における大規模言語モデルに対応するものとして説明した。世界の生成、変換、要約、次の状態の予測といった複数の役割を担えるという。こうした性質は、シミュレーションの高度化やSim2Realの改善を考える上でも重要な示唆になりそうだ。
例えばLebaredian氏は「いまいるヒルトンホテルの空間を水中環境に変える」といった例を挙げ、同じモデルで世界の変換も行えると説明した。
ロボットの最大課題は「手」と「触覚」
一方でLebaredian氏は「ロボティクスには依然として大きな課題が残っている」とも指摘する。
それは「ハードウェア、特に"手(マニピュレーション)"である。具体的には「人間レベルの器用さを持つ手が必要」「高精度な触覚センサーが未成熟」だという点。それに加えて「軽量かつ高強度なボディ設計がまだ難しい」こともあげられる。
興味深いのは、これまでロボット開発が進まなかった理由についての指摘だ。
それは「脳がなかったから」。どれだけ優れたハードウェアを作っても、それを制御する知能がなければ実用にならないことをあげた。
しかし、(ChatGPTなどの)LLMの登場によって状況は一変した。AIによって「使える脳」が実現されたことで、ようやくロボットの実用化が現実味を帯びてきたのである。
「ロボットのChatGPTモーメント」は来るのか
では、ロボットのブレイクはいつ起きるのか。
Lebaredian氏は「技術はすでに揃っている」「不足しているのは"市場との接続"だけ」だと見ている。
これはChatGPTの登場と同じ構造だと言う。実際、Transformerなどの基盤技術は数年前から存在していた。しかし、ユーザーインターフェースと市場ニーズが結びついたことで、ChatGPTの爆発的な普及が起きた。

ロボットも同様に、「ある工場で完全自動化が実現」「それを見た企業が追随」という形で、一気に普及が進む可能性が高く、特に「労働力不足」という“無限に近い需要”が背景にある以上、そのインパクトは極めて大きいと指摘する。
フィジカルAIは「開発の民主化」へ
今回のブリーフィングから見えてくるのは、フィジカルAIの本質的な転換である。
それは「データ依存からの脱却(学習データは生成できる)」「コンピュート主導への移行」「開発の民主化」という流れだろう。
そして、NVIDIAの戦略の輪郭も見えてきた。
同社はすべてをオープンにすることで「エコシステム全体の成長=自社の成長」という構造を作り出した。
Lebaredian氏の説明からは、フィジカルAIが一部の巨額投資企業だけの領域ではなくなりつつあること、そして「ロボットが将来の労働力として大きな価値を持つ」とNVIDIAが見ていることを読み取ることができた。