






「AI博覧会 Spring 2026」が、2026年4月7日(火)・8日(水)の2日間、東京国際フォーラムで開催されている(主催:アイスマイリー、入場無料、事前登録制)。
今回から新設された注目のエリアが「フィジカルAI・ロボットゾーン」。社会的な注目度が高まるフィジカルAI関連として、ヒューマノイドや四足歩行ロボットの稼働展示が行われ、多くの来場者が詰めかけていた。

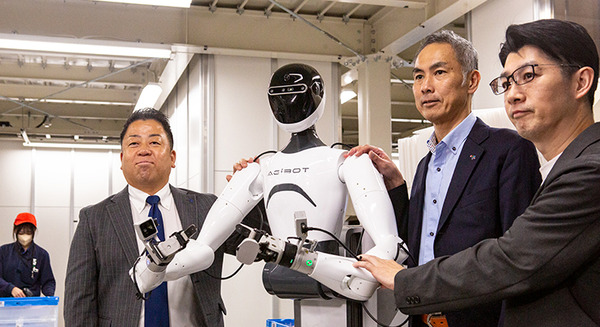
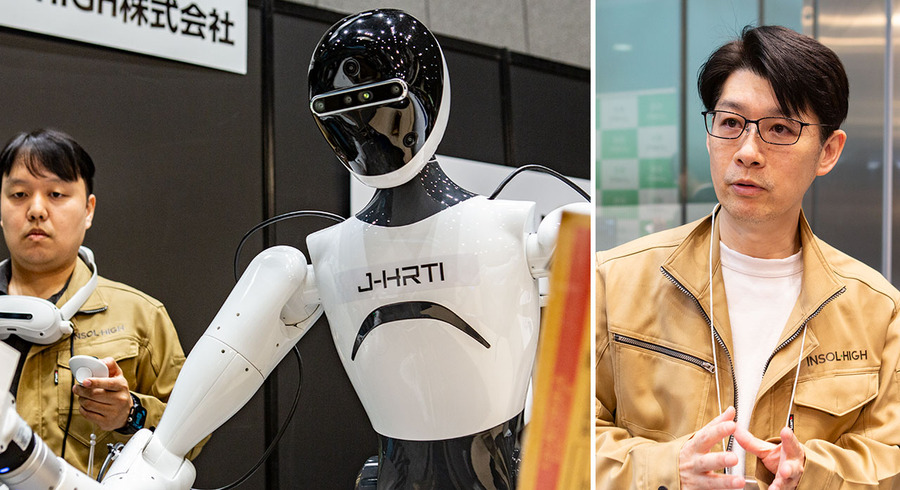
「フィジカルAI・ロボットゾーン」のエリアでヒューマノイドの稼働デモを公開していたのが、株式会社山善とINSOL-HIGH株式会社だ。
複数のデモが用意されており、ロボスタ編集部が訪れた時間帯には、ラインに流れてくる除菌シートを箱詰めするタスクをヒューマノイドが行うデモが実施されていた。

厳密には、ヒューマノイドが自律的にタスクを実行するデモではなく、ヒューマノイドにこのタスクを学習させるトレーニングの様子を紹介したものだ。
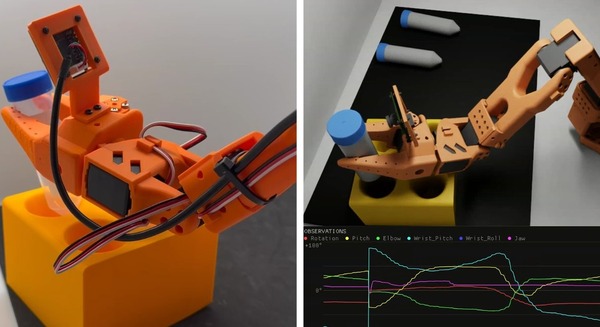
ヒューマノイドの隣にはスタッフがいて、遠隔操作でヒューマノイドを操作してタスクをこなしていく。ロボットの身体を持ったAIはその動きを学習する。
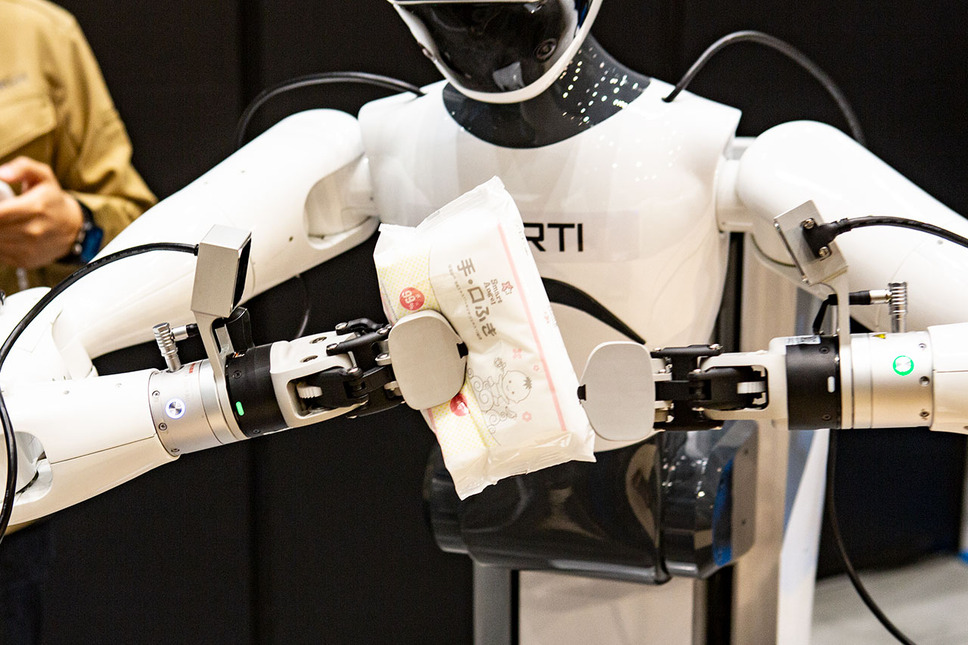
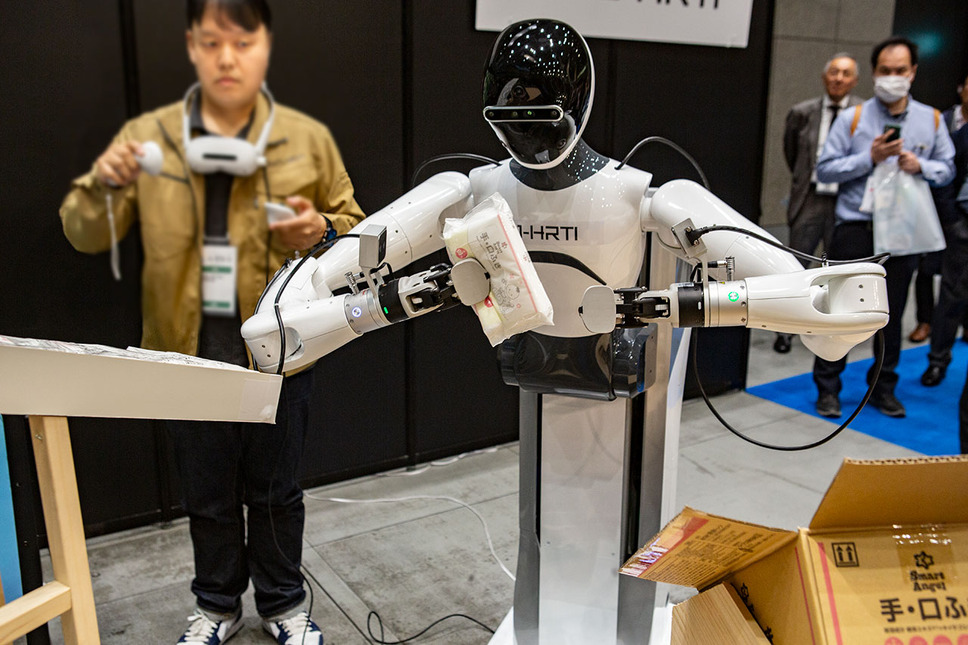
遠隔操作を通じて、視点や各関節、指の動作などのデータを収集し、学習することで、やがてはタスクがこなせるようになる。一般的には「リーダー/フォロワー式の模倣学習」と呼ばれるトレーニング方法だ。
山善とINSOL-HIGHが描く「共創型ロボット開発」
AI博覧会の会場で、INSOL-HIGHの代表取締役、磯部宗克氏にインタビューした。
同社はヒューマノイドロボットの社会実装に向け、「データ基盤」と「共創型コンソーシアム」を軸とした独自のアプローチを推進している。

2026年3月26日に、山善とINSOL-HIGHは、ツムラやレオン自動機と共同で、ヒューマノイドロボットの社会実装を加速することを目的としたコンソーシアム「J-HRTI(Japan Humanoid Robot Training & Implementation)」の設立を発表している(関連記事「山善ら4社がヒューマノイドロボット社会実装コンソーシアム「J-HRTI」設立」)。

INSOL-HIGHの最大の特徴のひとつは、ハードウェア開発を行わず、データ収集とソフトウェア開発プラットフォームに資源を集中させている点だ。
■「50台規模の実機センター」現場×シミュレーションでモデルを進化
INSOL-HIGHでは現在、ロボットを最大50台設置可能な大規模な国内データ収集センターを構築中だ。ここではサーバ、ネットワーク、トレーニング環境までを一体で整備し、企業コンソーシアムと連携しながらデータを収集し活用していく考えだ。

最初は基礎的なデータを主に工場や物流倉庫などの現場から取得し、そこにシミュレーションも組み合わせることでデータを拡充して学習効率を高める。シミュレーションで学習したモデルは、現実の物理社会でのギャップを埋めるためファインチューニングを行い、実践導入へと開発が進められる。
機械学習や強化学習、シミュレーターを活用しながらモデルを構築し、アノテーションによる検証を経て、再び機械学習で精度を高めるというフライホイールサイクルを回す。アノテーションも国内センター内で完結させる計画だ。
ハードは作らない、「最適なロボットを選ぶ」戦略
同社はヒューマノイドのハードウェア開発は行わないと明言する。
デモで使われていたヒューマノイドは中国のAgiBot製。開発環境や基盤モデル、データ、双腕マニピュレーション領域に至るまで「一歩先行している」「アップデートも頻繁に行われている」と、磯部氏はAgiBotを評価している。
一方で、AgiBotに固執することなく、特定メーカーへの依存も避ける方針だ。日本でも話題となっているUnitree Roboticsについては「同様のロボット開発基盤やプラットフォームを整備し始めていて注目している」としつつも、現時点ではAgiBotがデータ量とエンジニア層の厚さで優位と分析している。
「中国の企業のようにロボット基盤モデル全体を構築するために数億円の予算を用意することは私達にはできません。そこは長期的に見て、私達なりの勝ち筋をどう作っていくかが重要だと考え、データを蓄積することで社会実装を進めていく選択をしました。
その実現のためにもAgiBotの開発環境を活用していますが、AgiBotのエンジニア達は層が厚くて気持ちも熱い。海外有名大学の研究室出身や大手IT企業出身のエンジニアが多数参画しています」と想いを語った。

また、NVIDIAのロボティクス基盤や世界モデル(IsaacやGR00T、Cosmosなど)の活用についても「選択肢の一つ」としつつ、自社独自のアルゴリズム開発にも取り組む可能性も示唆した。将来的にはNVIDIAとの連携の可能性にも柔軟な考えを示した。
共創の社会実装コンソーシアムを設立
INSOL-HIGHが掲げているもう一つの柱が、企業連携によるコンソーシアムの構築だ。
連携に興味があったとしても、企業によっては「基盤モデルなどが最終的にオープンになるのなら、自分たちが提供した現場のノウハウやデータが、競合他社にも使えるようになってしまえば優位性が保てないのではないか?」と心配するケースも考えられる。
しかし、磯部氏は「社会実装に必要なデータは1社で収集できる規模ではありません。それはインフラに近い」と表現する。背景にあるのは、ヒューマノイド開発に必要なデータ量のスケールだ。
その上で、心配する企業の考えも考慮して「汎用動作を学習するための基盤データは“共有資産”として蓄積」し、「各企業の現場に最適化するファインチューニングは“個別資産”として管理」するというしくみを採用する。これにより、スケールと競争優位性の両立を図る考えだ。
「今は100点ではなく50点でもいい。そこに価値がある」
大量のデータを収集し、社会実装を推進するコンソーシアムを発表し、今後は連携パートナーを増やしていくことがひとつの鍵になってくる。コンソーシアムに興味を持った企業たちにとっては、パートナーとして具体的にどんなことを提供し、その結果どんなものがフィードバックされるのかが気になるところだろう。
磯部氏は「現時点ではまだ、ヒューマノイドに何ができるのかという定義は確立されていません。だからこそ今は、ヒューマノイドに何ができるかを知ること、既にどんなタスクであればできて、今後どのようなタスクを実現するためにデータを収集しているかということを、参画した企業が知ることができる環境を提供できると思っています。
参画企業は自分たちの現場を当然よく理解しています。そのうえで、ヒューマノイドが今できること、これからできるようになることも見えてくる。それは私達が、社会実装を進めるための次の1歩を踏み出す価値ある取り組みだと考えています」と語った。
同社が強調するのは、ヒューマノイド導入の“現実的な価値”だ。
磯部氏は「現時点では、ロボットがすべての業務を代替することはできない。しかし、タスクの一部でも代替できれば生産性は大きく変わる」として、次のように続けた。
「リアルな例で言うと、ヒューマノイドを導入したとしても、1から10まですべての作業をロボットに代替させることはできません。ただし、たくさんのタスクの中から1から3までをロボットで代行できるとしたら、今まで5人のスタッフが必要だったところが、3人のチーム体制で進められるかもしれない、というその気づきが重要だと考えています。今はまだ100点ではなく50点でもいい。そこに価値がある」
「まずヒューマノイドができることの現実を知ってもらいたいと思っています。今は100点満点じゃなくて50点かもしれません。だけど、マネタイズや生産性の向上が見えてくる。この生産性の向上を価値と捉えて、まずはロボットを導入してもらいたい。それを少しずつ積み重ねていけば、いずれは100点満点が取れるようになっていくというストーリーを、参画してくれる企業の方々には常に伝えています」と続けた。
小さな成功や達成の積み重ねが、最終的に完全自動化へとつながるという考えだ。
ヒューマノイド開発競争、日本の勝ち筋とは・・
今回のインタビューで改めて認識できたのは、ヒューマノイド開発の主戦場がどこにあり、日本の勝ち筋がどこにあるのかという点だ。
「ハードは作らない」「膨大なデータを集める」「共創でスケールさせる」「部分的にでも現場で使えるレベルからロボットを導入する」。これらINSOL-HIGHの戦略はシンプルだが本質的だ。現在の「フィジカルAI」の王道のアプローチと言えるだろう。
また「完璧を待たずに導入する」という現実解も重要だ。ヒューマノイドは“完成してから導入するもの”ではなく、使いながら進化させていくインフラだと理解すべきなのかもしれない。そして、この認識の差が今後の企業競争力を大きく左右することになるかもしれない。