




テレイグジスタンス株式会社は2026年6月10日(水)、AWS・NVIDIA・MassRoboticsが共同推進する「Physical AI Fellowship 2026」の成果として、ヒューマノイドロボットによるVLAベースの自律動作デモと、NVIDIAのWorld Model「DreamZero」を活用した連携について公開した。
テーマは「From Real Humanoid Data to Physical AI」。大規模な実環境テレオペレーションで収集したデータを基盤モデルの学習に直結させ、フィジカルAI実現へのパイプライン全体像を初めて対外的に示した事例だ。


シングルポリシーVLAがコンビニ袋詰めを完全自律実行
今回のデモの核心は、複数のサブタスクをつないだものではなく、1つのVLAモデル(シングルポリシー)が知覚から行動までをエンドツーエンドで処理する点にある。
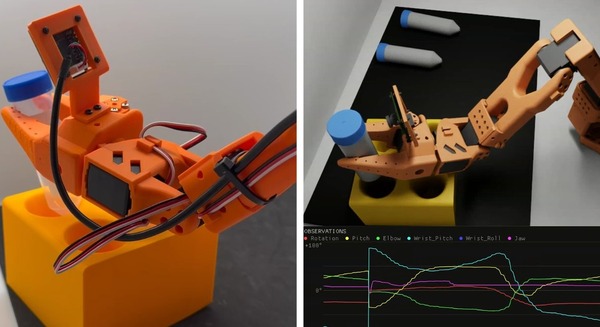
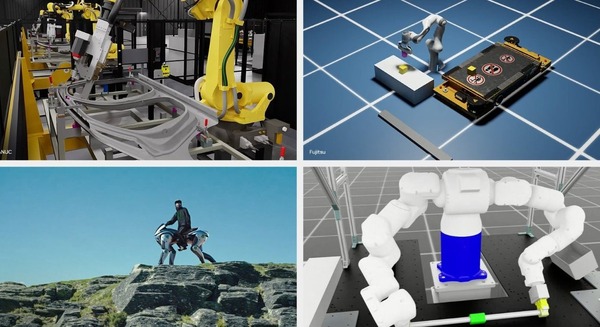
デモ映像では、同社のヒューマノイドロボットが日本のコンビニのレジカウンターで、ペットボトル・おにぎり・お菓子など複数の商品を両腕で把持し、レジ袋に詰める動作をテレオペ介入なしの完全自律で披露した。



フィジカルAIにおいてのシングルポリシーアプローチは、ロボットのスケールアップに向けた重要な技術的方向性として位置づけられている。
NVIDIA「DreamZero」との共同実装・リアルデータと基盤モデルを橋渡し
あわせて公開されたのが、NVIDIAのWorld Model「DreamZero」を用いた共同実装の成果だ。
「DreamZero」はロボットと周囲のシーンの「未来の状態」を予測するWorld Modelで、シミュレーション環境での動作予測に加え、実環境のヒューマノイドテレオペデータからのオフライン予測を実施。同社が実世界で収集したデータが基盤モデル学習に活かされることを実証した。
同社はNVIDIA・AWSのチームとともにこの研究を継続しており、ロボティクス基盤モデル開発の中核に位置づけている。
3つの技術課題を「現在地」として率直に開示
同社は今回のデモを完成品としてではなく「研究の現在地」として公開。
動作速度:現状は実用速度に届いておらず、デモ映像では等倍(1x)と8倍速(8x)の両方を公開
モーションの滑らかさ:VLAモデルの出力をロボット制御に変換するアクション表現の設計が課題
汎化性能:対象物の位置が数センチ変わるだけで動作精度が低下するケースがあり、データ量・多様性のスケールで解決を目指す方針
上記の3つを課題として明確に掲げる同社の開発に、今後も目が離せない。