







株式会社オカムラは物流施設においてカゴ車を使用した工程間搬送や整列配置の自動化を実現する自律移動ロボット「ORV」(オーアールブイ:Okamura Robot Vehicle)を2022年9月より発売することを発表した。
「ORV」はセンサーで周囲の環境を把握し周辺地図の作成と自己位置推定を行うSLAM技術を活用し、AI(人工知能)を搭載した自律移動ロボット。カゴ車を自動認識して取りに行き、カゴ車の片側をつかみ上げて目的地まで障害物を避けながら搬送する。けん引ではないためカゴ車と一体になりその場で旋回するなど小回りが利き、バック走行が可能なため狭い空間でも隙間なくカゴ車を整列配置させることができる。物流施設においてモノを単純に動かす・運ぶという作業の自動化を実現する。
物流施設における背景と課題
物流現場では多頻度小口化など物流サービスの多様化と労働人口の減少により倉庫内作業の自動化、省力化のニーズが高まっている。モノを単純に動かす・運ぶという作業の自動化は従来の無人搬送車(AGV:Automatic Guided Vehicle)で可能となっているが、床面に軌道となる経路テープやマーキングが必要なため走行軌道の変更に手間が掛かる、軌道上の障害物を避けて走行できないといった課題があった。特にカゴ車の移動、搬送はかなりの重量物であることに加え、数量、回数が多いことから、多くの物流現場で自動化が課題となっていた。
「ORV」はセンサーで周囲の環境を把握し周辺地図の作成と自己位置推定を行うSLAM技術を活用し、AIによりカゴ車を自動認識して取りに行き、カゴ車の片側をつかみ上げる「片持ち方式」で、目的地まで障害物を避けながら搬送する自律移動ロボット。走行ルート設定の自由度が高く、床面工事や経路テープやマーキング、ルート設定のためのランドマークなどが必要ないため、レイアウト変更や動作エリアの拡張に柔軟に対応できる。
自律移動ロボット「ORV」(Okamura Robot Vehicle)の特徴
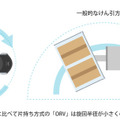
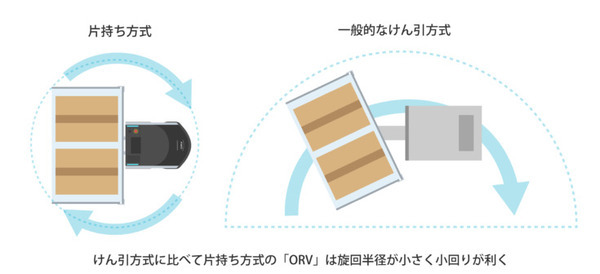
・狭い通路でも搬送可能な「片持ち方式」
カゴ車の片側をつかんで持ち上げるため、把持動作の後はカゴ車と一体になって走行する。一般的なけん引方式よりも旋回半径が小さくその場で旋回が可能で、狭い通路でも小回りが利く。
・整列配置の自動化が可能
片持ち方式でカゴ車と一体になって走行するため、バック走行が可能。これにより、トラックバース前の出荷待機や、垂直搬送機などの狭い空間への整列配置を自動で行うことができる。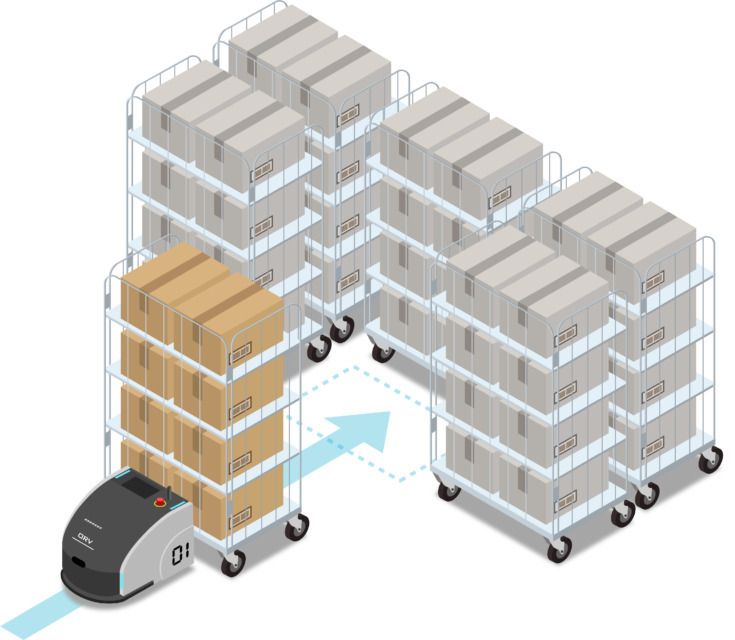
・搬送ルートに応じたフレキシブルな動作
障害物を検知して回避する基本動作のため、走行ルートに障害物がある場合でもフレキシブルに対応する。狭い通路では回避ではなく一時停止するなど、作業する場所に応じた動作設定が可能。
・AIによる自動検出
「ORV」がカゴ車をつかむためのカゴ車の改造やマーキングは不要。AIによる自動認識により、カゴ車を検出して把持することができる。
・レイアウト変更や動作エリアの拡張を柔軟に対応
SLAM技術により、環境地図作成と自己位置推定を行い、目的地までの最も効率的なルートを自ら導き出すため、AGVのような経路テープやマーキング等の床面工事やカゴ車の改造をすることなく導入できる。これによりレイアウト変更や動作エリアの拡張に柔軟に対応できる。
・自動充電機能
充電が必要になると、設置した給電装置に自動で向かい充電する。また、搬送対象のカゴ車が途切れた合間の時間や動かす必要のない時間を事前に設定し、充電することも可能。
・IoT遠隔監視システムにより止まらない作業現場を実現
IoT遠隔監視システムにより、「ORV」の稼働データをクラウド上にアップロードする。そのため、ユーザー現場で不具合が起きた際にはログから問題の調査が可能。
「国際物流総合展2022 Logis-Tech Tokyo 2022」展示・デモンストレーション
2022年9月13日~16日に東京ビッグサイトで開催される「国際物流総合展2022 Logis-Tech Tokyo 2022」オカムラブースにて、実機を使ったデモンストレーションを実施する。
自律移動ロボット「ORV」主な仕様
| 最高速度 | 60m/分(単体走行時)、 40m/分(カゴ車搬送時) |
|---|---|
| 最大可搬質量 | 300kg |
| 最小通路幅 | 900mm(単体走行時) |
| 外形寸法 | 640W×930L×500H mm |
| 電源電圧 | AC100V (給電装置) |
| 充電時間 | 約1時間 |
| 連続稼働時間 | 5時間 ※使用状況により変動 |
| 通信方式 | WiーFi通信、Bluetooth®通信、3G/LTE(セルラー通信モデルのみ) |
