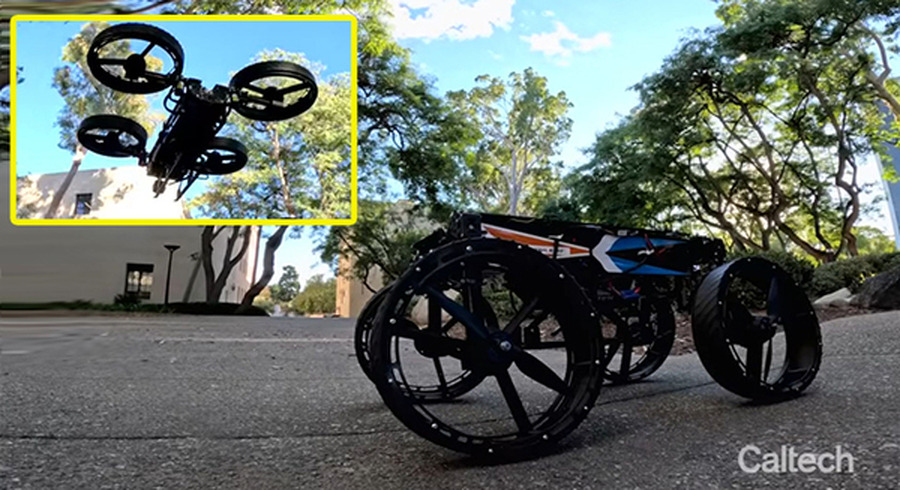


カリフォルニア工科大学は、飛行・運転・歩行そしてスキルの組み合わせによる8種類の動作が可能な、多才なロボットを発表した。このロボットは、エッジAIとロボティクスのためのNVIDIA Jetsonプラットフォームで実現されている。
この世のものとは思えない変形ロボットの開発に取り組む
Mory Gharib氏とAlireza Ramezani氏は、2020年、文字通りこの世のものとは思えない変形ロボットの開発に取り組んでいました。NASAの火星探査機だ。
カリフォルニア工科大学で航空工学と生体工学の教授を務める Gharib氏は、
Mory Gharib氏
実現したい機能が増えるにつれて、このような多才なロボットになりました。当初設計チームに提案したとき、皆、無理だろうと言いました
と述べている。
カリフォルニア工科大学はその初期研究に資金を提供。NASAとNASAのジェット推進研究所(Jet Propulsion Laboratory:JPL)がその次の段階に資金を提供、さらに2022年の夏、ノースイースタン大学の電気コンピューター工学の助教であるRamezani氏をJPLの教授研究員として迎え入れ、さらに開発を進めた。
そのM42バージョンは現在、火星探査機の候補としてNASAで開発中であり、米国運輸省からも関心が寄せられていると Gharib氏は述べており、「NASAでは今、着陸時の変形をテストしているところです」と話している。
最近『Nature Communications』誌に論文(Multi-Modal Mobility Morphobot (M4) with appendage repurposing for locomotion plasticity enhancement)を発表して以来、Gharib氏には多くのオファーが殺到しているという。
Mory Gharib氏
突然、これほど注目されるようになったことに、私たちは少し圧倒されています。あまりにも多くの機関にさまざまなコラボレーションを提案されています
と述べている。
消防、捜索、救助活動
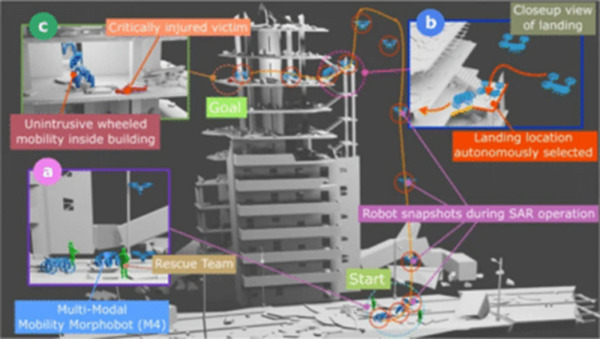
この論文を執筆したカリフォルニア工科大学のチーム(Gharib氏とRamezani氏、カリフォルニア工科大学の航空宇宙分野の博士研究員である Eric Sihite氏、JPLのArash Kalantari氏、CAST(Center for Autonomous Systems and Technologies)の設計エンジニアであるReza Nemovi氏)は、「M4は捜索や救助など多様なミッションに対応できるように設計されている」と述べている。
例えば、火災現場など、走行したり歩いたりすることが不可能な場所では、カメラやセンサーを使って状況を把握するために飛行して偵察することができる。
Gharib氏によると、ロサンゼルス地域の複数の消防署がM4に興味を持ち、問い合わせしていると言い
Mory Gharib氏
消防隊員などの初期対応者にとっては、安全な場所に着陸してから現場に突入する必要があるため、非常に大きな利点となるのです
多彩なドローン配送で仕事を効率化
カリフォルニア工科大学のチームは、M4を使ってドローン配送の複雑さを解決することも目指しており、「ドローンによる配達はこのロボットにとっては容易い作業である」とGharib氏は言っている。
従来の配達用ドローンは、安全上の理由から、誰もドローンが自宅や会社の近くに着陸することを望まないことに大きな課題があると彼は述べている。これに対し、M4は人から隔離された場所に着陸し、そこから走行して配達を終えることができる。
M4は、トラックでの配送が困難な地域や、配送サービスをまったく提供できない地域を飛ぶこともでき、Grab氏は「トラックで配達できない場所はたくさんあるのです」とも述べている。
現在、M4は時速40マイル(約64km/h)、バッテリーは1回の充電で最大30分の飛行が可能。しかし、より長い飛行時間、より大きな積載量、より長い移動距離を持つより大きなドローンの設計にも取り組んでいることを明かしている。
NVIDIA 創業者/CEO ジェンスンファン氏、気象変動や気候予測には「AIによるシュミレータ、計算能力、デジタルツインが必要」と先進技術を語る
NVIDIA「生成AI Day 2023 Summer」開催へ 画像生成AIや大規模言語モデルの最新情報や活用方法を解説 東大松尾教授との討論も
NVIDIA 世界の大手エレクトロニクスの最先端工場をデジタル化 NVIDIA生成AIとOmniverse、Isaac、Metropolisを活用
NVIDIAとMicrosoftが連携 AzureユーザーはNVIDIA AIのフレームワークとツールの利用や管理が簡単に
こんな多くの自動車メーカーがNVIDIAと連携!BMW/メルセデス/トヨタ/GM/ロータス/ボルボ/ジャガーなどデジタルツイン構築やロボティクス運用、シミュレーション事例を紹介
NVIDIAがアマゾンロボティクスの物流倉庫等のデジタルツイン事例を紹介「Omniverse Cloud」をMicrosoft Azureで提供へ
【速報】NVIDIAが「ジェネレーティブAI」のクラウドサービス提供を発表!大規模言語モデル/画像生成AI/医療向け生成系AIをビジネス活用する時代へ
NVIDIA 関連記事



