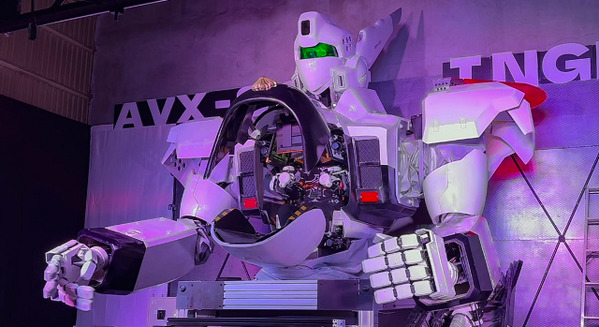
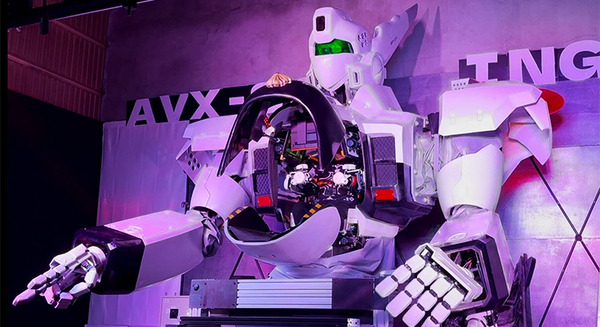
「2023国際ロボット展」では竹中土木および東北電力ネットワークとの共同開発成果として、人機一体が目指す社会実装の在り方をイメージしたデモンストレーションを、人機スチュワートプラットフォーム(人機GSP)Ver1.3を使って実施した。
人機一体は、独自共創モデルの一つである「空間重作業人機社会実装プラットフォーム」において、土木分野および電力分野での高所重作業対応の汎用ロボット重機「空間重作業人機」の社会実装に向けた開発プロジェクトを2023年4月より開始。竹中土木、東北電力ネットワーク、および日本信号と順次事業連携を進めてきた。
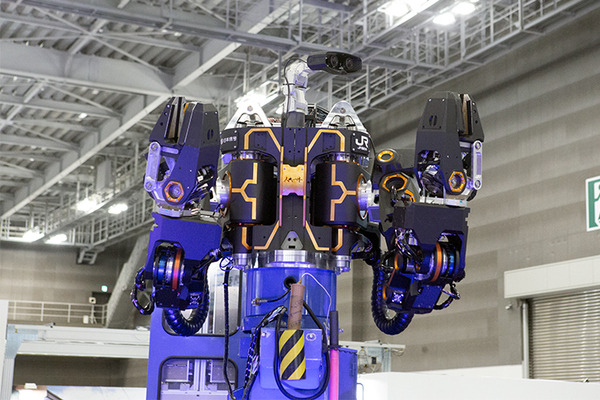
■零式人機 ver.1.3 / ver.2.0
空間重作業人機 社会実装プラットフォームの新たな取組(第二期)
第二期においては、土木分野および電力分野において人が生身で行なっている高所作業に対応できる空間重作業人機の社会実装に向けて、竹中土木、東北電力ネットワーク、および日本信号と新たな共同開発に取り組んでいる。その成果を「2023国際ロボット展」の同社ブースでデモとして公開した。
なお、この他にも川崎重工が研究開発しているヒューマノイド「カレイド」をベースにして、力制御技術を搭載した遠隔操作ロボット「零一式カレイド」のデモも公開した。関連記事「人機一体がヒューマノイド「零一式カレイド」のデモを公開 川崎重工のカレイドをベースに力制御技術を搭載した遠隔操作ロボット」
各分野における課題
土木分野における課題
例えば、橋梁工事・メンテナンス作業の工程にある鋼製ブラケットなどの高重量物の取付作業において課題がある。取付位置は橋梁の下部にあり、クレーンでは取付位置まで吊り上げることができないため、クレーンやデッキリフトで一定の高さまで上げた後、チェーンブロック等を用いて人力で取付位置まで吊り上げ、人が取付物と橋梁のアンカーバーなどの位置を調整して取り付けている。
電力分野における課題
配電線や柱上変圧器などの配電設備の工事・メンテナンス作業は多岐に渡りますが、そのほとんどは活線状態(電気が流れている状態)で行なわれている。現状は、高圧線の近くで作業に応じて様々な間接活線工具を使い分け、墜落、感電という労働災害と隣り合わせの中、人力で作業を行なっている。
■人機スチュワートプラットフォーム(人機GSP)Ver1.3による高所作業のデモ
新たな共同開発への取組
1:零式人機
零式人機シリーズの後継機として、零式人機ver.2.0の開発ノウハウを用いた新たな上半身人型ロボット重機を開発している。零式人機ver.2.0は、車両重量が7トンオーダーの高所作業車に搭載する仕様としていたが、後継機では小型化による軽量化を図り、車両重量の軽い高所作業車に搭載することで配電工事の多い生活道路などでも使えるような仕様を目指す。また、土木・電力分野においては、高所での部材交換やボルト等の締付をはじめとした工具を用いての作業を2人1組で行なうことが多くありますが、これを人型ロボット重機1機で行なえるように共同開発を進めていく。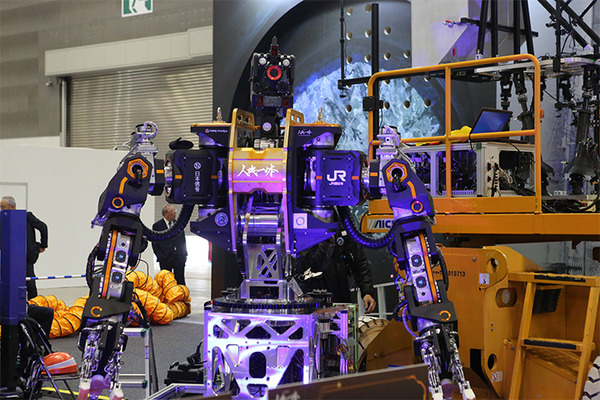
2:人機スチュワートプラットフォーム(人機GSP)
人機GSPは、数トンオーダーの高重量物の位置決め(短距離運搬)、組立、設置などの作業を機械化することを目的として人機一体が独自に開発を開始した電動関節ユニットの原理試作としてのPoC試作機。
試作機の運用例としては、デッキリフトや高所作業車などのデッキ上での運用が想定されている。接触を伴わない大まかな位置決めはデッキリフト等で行ない、微細な調整と力制御が必要となる、接触を伴う位置決めを試作機で行なうことで、これまで人力に依存していた設置作業を機械化し、作業効率を向上させることができる。主にクレーン設備がないまたはクレーン車の吊上高に制限がある環境下(橋梁下等)での活用を想定しており、実用化に向けた共同開発を進めていく。
人機一体の独自ビジネスモデル:人機プラットフォームとは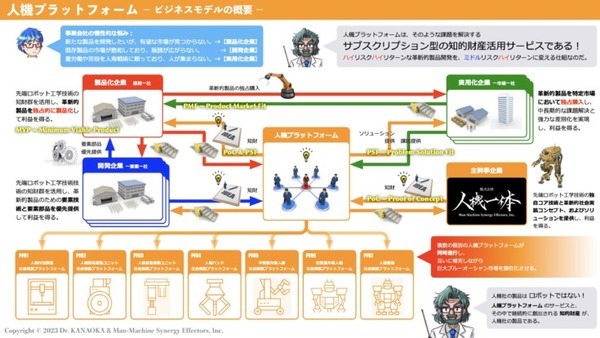
人機プラットフォームは、力学ベースの先端ロボット工学技術に関する知的財産、技術の社会実装に必要な製品コンセプトの企画提案、および試作機開発をパッケージ化して提供する課題解決型サブスクリプションサービスであり、プラットフォーム参画企業が投資費用および役割を分担してリスク分散することで先端ロボット工学技術の社会実装を可能とする共創ビジネスモデル。
人機一体は、既存メーカと競合しながらロボット重機を製造販売するのではなく、先端ロボット工学技術の知的財産権を武器に、従来技術では解決困難な課題を抱える企業様と連携し、それぞれの得意分野を活かして課題解決に取り組んでいくとしており、今回の PF06空間重作業人機社会実装プラットフォーム第二期においては、第一期の JR西日本(鉄道分野)に続き、竹中土木が土木分野における実用化企業、東北電力ネットワークが電力分野における実用化企業となり、各分野における現場課題の提供ならびに実証試験環境の提供を行なう。また、第一期に引き続き、日本信号が両分野共通の製品化企業となる。
2023国際ロボット展での成果発表
人機一体は2023年11月29日から 東京ビッグサイトで開催されている「2023国際ロボット展」に出展し、竹中土木および東北電力ネットワークとの共同開発成果として、人機GSPver.1.3を用いた高所での重量物取付のデモンストレーションを実施した。
PF06 空間重作業人機 社会実装プラットフォーム(第一期)の概要

人機一体の独自ビジネスモデル「人機プラットフォーム」におけるプラットフォームの一つ、PF06 空間重作業人機社会実装プラットフォームにおいてJR西日本、日本信号、および人機一体の3社で空間重作業人機の社会実装に向けた共同開発プロジェクトを開始した。
プロジェクト第一期では、以下の開発コンセプトを掲げて実用化に向けた共同開発に取り組み、実用レベル試作機である「零式人機 ver.2.0」を開発することに成功。2024年度中には零式人機 ver.2.0をベースとした製品が日本信号より製造販売され、JR西日本の営業線で導入される予定となっている。
開発コンセプト
1:インタラクティブな作用で直感的に操作
操作者が加えた操作力がロボットの駆動力となり、さらにロボットが受ける重み・反動を操作者にフィードバックすることで操作技術を容易に習得可能
2:形状によらない多様な部材の把持
多様な状況下での作業に応じて様々な道具や部材を把持できるメンテナンス性の高いロボット重機
3:作業の安全性向上
人は安全な地上に居ながらにして、自分の身体の延長線上のような感覚で高所重作業を実現
複数の大型ロボット重機による協調作業の実演展示を実施 人機一体が「2023国際ロボット展」に出展
鉄道の安全を支えるロボット多機能鉄道重機「零式人機ver.2.0」(人機一体)を京都鉄道博物館で特別展示 9月19日~10月2日
人機一体×JR西日本×日本信号 汎用ヒト型重機「零式人機」と「人機操作機」の詳細情報を公開
人機一体が汎用ヒト型重機と高所作業車が連携したド迫力のデモを公開 「零式人機ver2.0」JR西日本と日本信号が開発連携
【動画あり】汎用人型重機「零式人機 ver.1.0」を初公開 「空間重作業人機」開発プロジェクト始動!JR西日本×日本信号×人機一体
JR西日本×日本信号×人機一体 人機プラットフォームを活用した「零式人機」など「ロボテス EXPO 2021」で巨大ロボット多数展示
株式会社人機一体関連記事(ロボスタ)