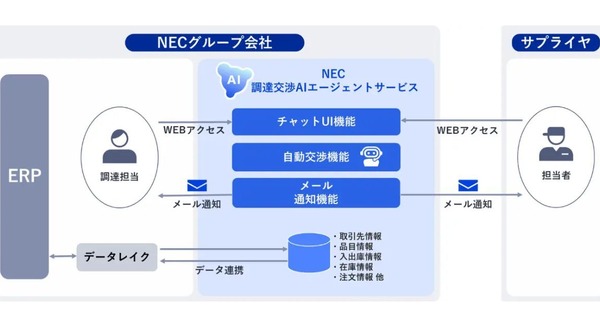

NECは、整理されず不規則に配置された物品に対し、精密なハンドリング作業が可能なロボットAI技術を開発した。今回開発した技術により、物品や障害物に隠れている領域やロボットの動作結果を予測することで、従来は人手で行っていたハンドリング作業をロボットで代替することが可能となり、生産性の向上や働き方改革に貢献するとしている。
開発の背景
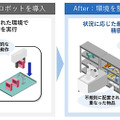
近年、人手不足を背景に、物流倉庫や工場などではロボットや大規模設備の導入による自動化のニーズが高まっているが、既存のロボット技術では、物品や障害物が不規則に配置された環境を正しく認識することが難しく、ロボットが作業しやすいように環境を整える必要がある。このためロボットの導入は、環境を整えやすい単純な定型作業などに限定されている。
技術の特長
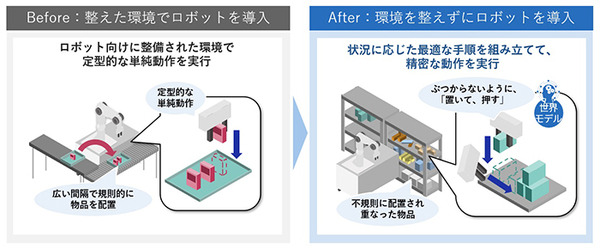
NECは映像を物体単位で解釈する「世界モデル(ロボットがある行動の結果として実世界で何が起こるかを、現実に試すことなく予測することを可能にする技術)」を応用し、ロボットが映像データから作業環境や自身の動作結果を高精度に予測する「時空間予測」と、それに基づいて最適かつ精密な動作を自動で生成する「ロボット動作生成」の2つからなるロボットAI技術を開発。
本技術は、2023年に発表したロボット制御AI技術を発展させたもので、ロボットに適用し実行させるのは世界初となる。
1:多様な形状の物品に対して精密な動作を最適な順序で自律的に実行
現場で人手によって行われるハンドリング作業は、多様な動作の組み合わせによって実行されている。
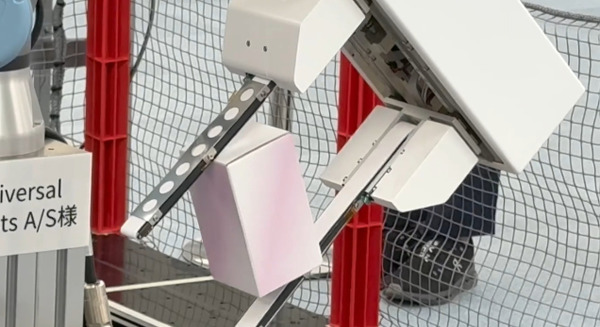
例えば物品の詰め込み作業では、人は、「物品を置いて押す」といった精密な動作を、他の物品や障害物にぶつからないよう瞬時に組合せて実行することができるが、ロボット制御では、「押す」「引く」といった動作は、「掴む」「置く」といった動作に比べ動作や物品形状の僅かな変化で物品の動きが大きく変わるため、従来の技術では高精度に実行させることが困難だった。また考慮する動作の種類が増加すると、動作の組み合わせや順序が複雑になり、リアルタイムに計画することにも課題があった。
本技術では、世界モデルの応用により、映像データからロボット動作に対する多様な形状の物品の動きを高精度に予測するモデルを学習し、「押す」「引く」といった精密動作を実行させることができ、作業環境に応じた適切な動作順序を高速に生成することで、「置いて、押す」「引いて、取る」といった複数の動作の組み合わせを自律的かつリアルタイムに実行することができる。
2:隠れて見えない物品を予測しながら動作

複数の物品が隣接したり重なったりした作業環境において、人は隠れて見えない領域を無意識に予測し、物品が崩れないように取ったり、完全に見えない障害物との衝突を避けるといった動作を行う。しかし、従来のロボット向け認識技術では、見えている領域から隠れた領域を予測するために、物品等が隠れた状態を示す教師データを大量に準備して学習させる必要があり、実用化は困難だった。
本技術では、世界モデルの応用によりラベル付けが不要な教師なし学習を実現し、隠れた物品形状の予測モデルを効率的に学習させることが可能。この予測モデルによりロボットは、作業環境をカメラに見えない領域まで正確に予測し、他の物品や障害物と衝突することのない最適な動作を自動で生成することができる。
今後の展開
NECは今後、2024年度中に物流倉庫など人手による作業が多く残る現場において今回開発した技術の実証を進め、自動化ニーズの高い様々な産業において本技術の社会実装を進めることで、生産性の向上や働き方改革に貢献していくとしている。
なお、NECは本技術を2024年2月20日~21日にかけて東京ビッグサイトで開催知る「ロジスティクスソリューションフェア2024」で紹介する。
NEC 掛川の最新スマート工場を公開!自動搬送ロボットAGV・AMR/量子アニーリング/ローカル5G/顔認証/エコ導入
NECと日本通運 フォークリフトの自律遠隔搬送ソリューションを共同開発 既存機種に後付け可能 倉庫内作業の効率性と安全性の向上へ
NEC、料理の注文から会計、複数機種の配膳ロボットの連携、全自動化を推進する業界初の統合飲食店向けサービス、下げ膳時間40%削減
物流DXを加速するNECの最新技術 安全と効率を両立させる自動搬送ロボット制御/大量のAIカメラ映像をエッジとクラウドで分散処理
NEC 関連記事(ロボスタ)
日本電気株式会社