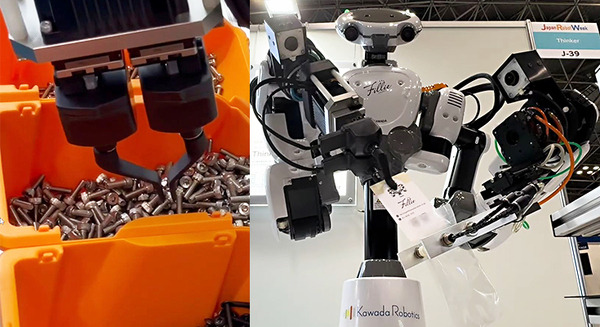





東京ロボティクスは「Japan Robot Week 2024」のGMO AIRブース内に出展し、同社が開発したヒューマノイド「Torobo」(トロボ)を使い、学習から自律動作まですべてニューラルネットワークだけでエンド・ツー・エンドで開発したデモを展示した。
展示したデモの内容は、ヒューマノイドロボットはテーブルのどこかに汚れを認識すると、自律的に手に持った簡易モップで即座に拭き取るというもの。最大の特徴は、汚れをみつけて拭き取るまでの判断や一連の手の動きを、ロボットは映像から学習していること。ティーチングやプログラムコードは一切使用していない。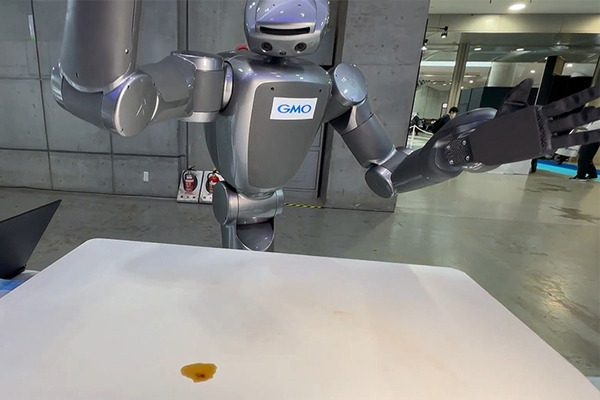

ニューラルネットワークだけで学習
具体的には、人間が汚れを見つけて拭き取る動作の映像を30~40パターン見せて、クラウドのGPUでAIに学習させて動作をディープラーニングで覚えさせた。これまでは、汚れの位置を抽出して、ロボットが台ふきんで拭き取りやすい位置に構え、自律的に手を動かして汚れを拭き取り、きれいに拭き取ったかどうかを確認する、という作業をティーチングやプログラミングによって開発していくことが定石だったが、このシステムでは映像を見せるだけ。ロボットの頭脳であるAIは汚れの認識や拭き取り方を自律的に学習し、「汚れを見つけたら拭き取る」という作業自体も自律的に覚えた。
また、拭き取り作業が一発で成功しているのは、同社の力制御技術が活かされている。
なお、ロボット自体に搭載しているにはCPU搭載のコンピュータが2基。この程度の作業(のAI推論)であれば、ロボット内にGPUは必要なく、エッジだけで処理できるという。
なお、今後のバリエーションとしては、テーブルに無造作に置かれたコップを自律的に棚に整理して並べる、などの作業もこのしくみの延長で実現できる見込みだ。作業が複雑になってくれば、ロボット本体側にGPUを使った高度なAI推論が必要になったり、クラウドや大規模言語モデルと連携するなどの展開も考えられるとしている。
■動画 汚れをみつけて自律的に拭き取るヒューマノイドのデモ(GMO AIRブースでの東京ボティクス)
東京ロボティクスの力制御と全身制御技術
東京ロボティクスは、単純労働や危険作業をロボットに任せることで、人間が知性と感性を生かせる仕事に専念できる世界を目指しているベンチャー企業。力制御と全身制御でユニークで先進的な技術を持つことでも知られている。
ハンマーを使って釘の打ち付け
ノコギリによる木材の切断