

日本電信電話株式会社(NTT)、三菱電機株式会社は、NTTのネットワークおよびコンピュート基盤の連携制御技術と三菱電機の遠隔操作技術を組み合わせた実証実験を通じて、これまで操作が困難であったロボットアームを用いた作業を遠隔地から違和感なく持続的に操作可能であることを確認したことを発表した。
この実証実験により、人が物を移動させる際や物を掴む際などに、物に触れた感触や物を掴む力具合を把握する感覚情報「力触覚情報」を用いたロボットによる高度な遠隔操作を簡易なデバイスで実現できる可能性が高まった。また、遠隔操作を安全に実施可能であることが分かった。
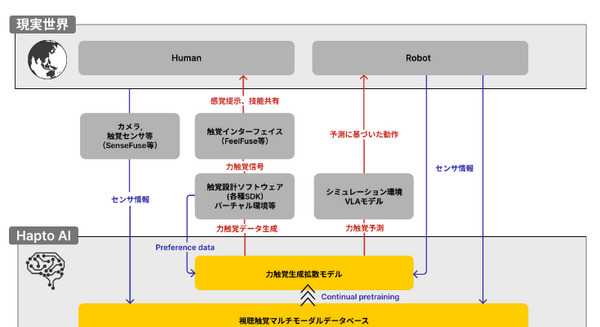
力触覚情報を色情報に変換する技術
これにより、End-to-End で遅延品質を管理し、制御する技術を用いて低遅延品質保証が可能になり、また力触覚情報を色情報に変換する技術を用いて機器数が少ないシンプルなデバイス構成で力触覚情報の伝達が可能となる。その結果、ロボットなどによる高度な遠隔操作の適用領域の拡大が期待できる。また、操作者の拠点集約による効率化、労働人口減少等の社会課題の解決に繋がることも同様に期待できる。
なお、この実証実験で実施した技術については2023年5月17日(水)~18日(木)に開催予定の「つくばフォーラム 2023」にて紹介される予定。
テレワークや遠隔操作での専門作業のニーズは大きい
近年、日本では労働人口の減少が進んでおり、技術者を日本全国に配置・派遣することが困難になることが予想される。また、新型コロナウイルスの世界的な感染拡大に伴いライフスタイルおよび業務スタイルが大きく変化し、リモートワークが一般的なものとなった。
一方で、現在も遠隔での実施が難しい業務は多く存在し、リモートワークが困難な技術者が依然として多い状況でもある。特に、自動化・機械化が困難なことから危険を伴う作業であっても人手で実施されているケースや、身体的、時間的、移動の制約などから技術者の専門性が発揮できる場での業務に従事できていないケースがある。
これら社会的な課題を解決する方法の一つとして、遠隔地から高度な作業をできるようにすることで、作業者の所在地に関わらず業務の遂行を可能とする遠隔作業の実現が期待されている。
遠隔作業のポイントは力触覚など感覚情報の伝達
高度な作業では視覚以外の感覚も使って作業をするため、遠隔作業の実現にあたっては、現地の映像情報に加えて、「物体との接触状態や作業中の力加減を知るための力触覚情報」等の感覚情報の伝達が重要。映像情報や力触覚情報等をユーザが使用するデバイスの性能に依存せずに安定的に伝達するには、映像情報や力触覚情報等の高負荷処理をネットワーク上のエッジサーバで行うなどの工夫が必要となります。一方で、エッジサーバ上で処理を実施するにあたっては、ネットワークの観点では、エッジサーバでの処理も含めた End-to-End サービスとしての遅延時間やジッタ(ずれや揺らぎ)を低くするだけでなく、システムの故障や性能劣化時にもサービスの品質劣化を招かないようにすることが課題となっている。また、デバイスの観点では、機器数が少ないシンプルな構成でありながら、映像情報等と同期して、違和感なく力触覚情報を伝達する方法が重要視されている。
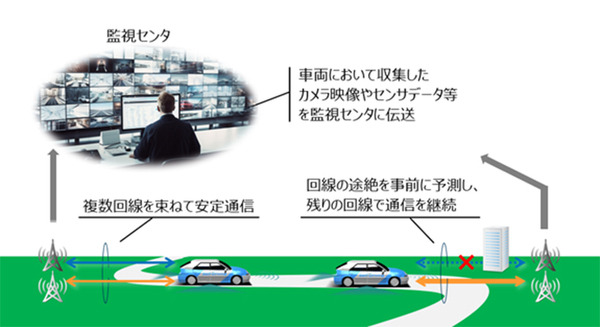
複数経路で安定した通信レスポンスを確保
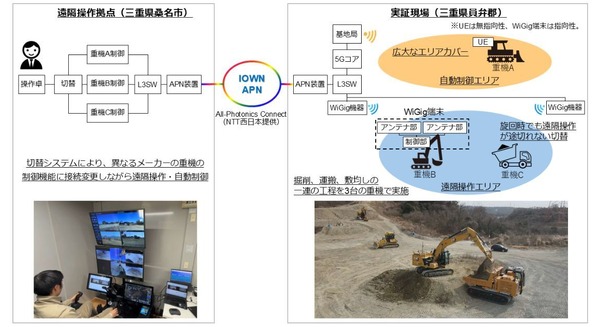
NTTグループは、次世代コミュニケーション基盤である IOWN 構想の具現化を進めており、2023年3月16日に APN IOWN1.0サービスの提供を開始した。さらに、IOWN2.0 以降に向けて光技術を用いた更なる低遅延・低ジッタなネットワークの実現に取り組んでいる。
従来、ネットワークサービスを提供する際、エッジサーバの処理時間とネットワークの遅延時間に関し、個々の品質管理は実施していたが、両者を組み合わせた End-to-End での遅延時間の評価や品質管理は実施されてこなかった。
今回、APN のネットワークにて 2地点間を複数経路で結ぶことができる環境において、エッジサーバでの処理時間とネットワークの遅延時間をリアルタイムに状態把握し、End-to-End での遅延時間が性能要件を満たさなくなる場合には別の経路および別のサーバ処理に即座に切り替えることで、安定した低遅延サービスを提供するネットワーク&コンピュート高速クローズドループ制御技術の研究開発に取り組んだ。(下記の図1)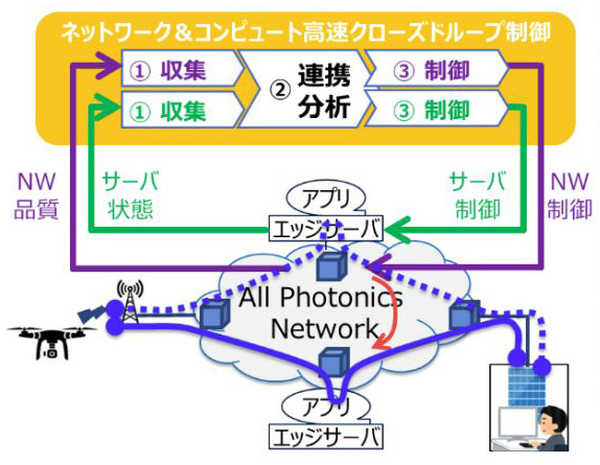

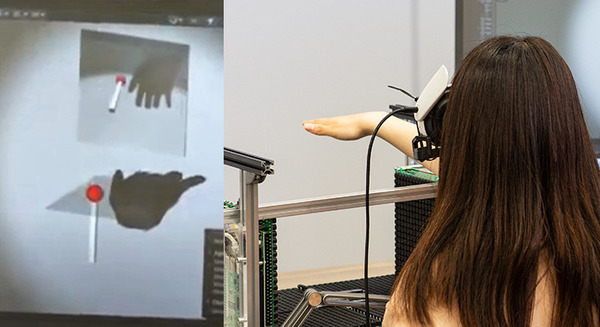
遠隔地の力触覚情報を色情報に変換する「Visual Haptics」
三菱電機では、視覚と力触覚との間の感覚間の相互作用を活用した「Visual Haptics」 を開発し、遠隔地の力触覚情報を色情報に変換し、視覚情報としてユーザに提示することで、力触覚デバイスなしで遠隔地の力触覚情報の伝達を実現してきた。
今回、Visual Haptics をロボット内での実装からエッジサーバ上での実装に変更することで、ロボット側で必要な処理負荷を軽減すると共に、エッジサーバの切り替え動作にも対応可能な Visual Hapticsの研究開発に取り組んだ。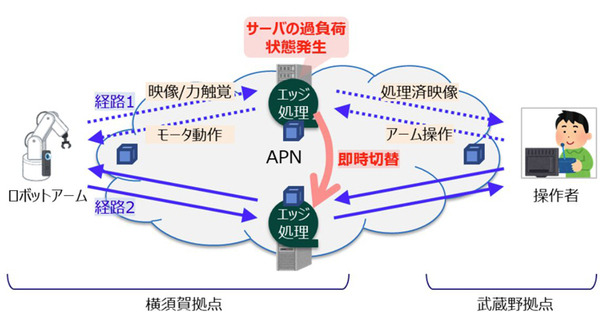
今後の展開
両社は、この実証実験で得られた成果は、高度な作業をアシスト機能付きの遠隔操作で実施可能にすることができ、場所を問わない作業の幅を広げることが期待できるとしている。今後は適用可能領域を広げ、人命にかかわる高度な操作の遠隔化として遠隔手術や遠隔設備修理など様々なユースケースで適用可能とすることで、場所にとらわれない新たな働き方の具現化を実現したい考えだ。
また、これによって、技術者の移動時間削減による生産性向上、身体的な制約のある人の就労機会提供、さらには医療等の地域格差解消などをめざす、としている。
日本ロボット学会「触覚と疼痛、意識と無意識、知覚と認知」特集記事を公開 遠隔触診実現への新たな知性、ハプティクス最新研究の座談会
世界初 6G時代に「人間拡張基盤」を提供へ ドコモと慶大、名工大がモノに触れた時の触覚共有の技術「FEEL TECH」を開発
慶應大「リアルハプティクスでロボットが進化する」オープンセミナーをオンライン開催 無意識的な動作と力触覚
「触覚」と視覚・聴覚で花火を体験 千葉工大が東京スカイツリーで体験展示【世界初】皮膚せん断変形の椅子型触覚提示装置チェイニー
慶應義塾大学ハプティクス研究センターが「力触覚」の鼎談トーク動画を作成「CEATEC 2022」と「Japan Robot Week2022」に出展へ
慶應義塾大学ハプティクス研究センターが「力触覚」の鼎談トーク動画を作成「CEATEC 2022」と「Japan Robot Week2022」に出展へ
ハプティクス(力触覚)関連記事