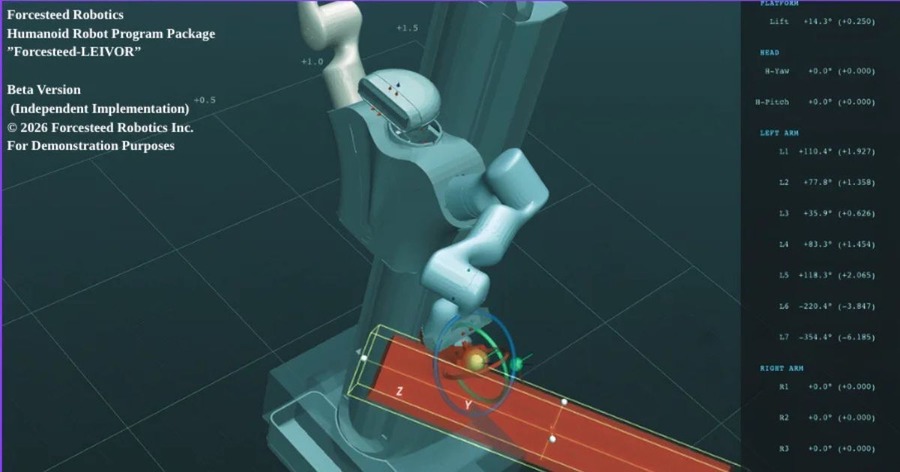


Forcesteed Roboticsは、汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR(レイバー)」を開発したと発表した。
同製品は、産業用ロボット分野で広く用いられてきたティーチングによる動作設計に加え、模倣学習および推論処理といったAIロボティクス技術を統合したフレームワークである。
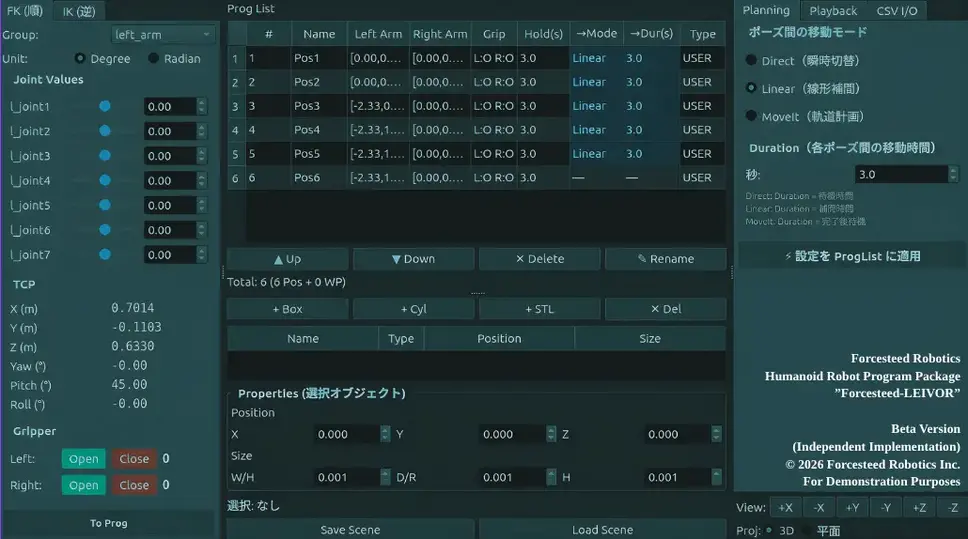
ロボットの学習(Learning)・動作生成(Execution)・知的行動(Intelligent Behavior)・実行制御(Operation)を一体的に扱うことが可能で、従来のロボットSIerが持つ開発ノウハウを活かしながら、ヒューマノイドロボットの導入・運用を推進する。

ヒューマノイド導入の課題とForcesteed-LEIVORの位置付け
ヒューマノイドロボットは今後の成長が期待される分野とされる一方、実際の業務現場への導入はいまだ限定的だ。その背景には、ヒューマノイドロボットの開発・導入が、これまで産業用ロボットの導入を担ってきたロボットSIerの開発手法と必ずしも接続していないという課題がある。
産業用ロボットの世界では、人がロボットの動作を教えるティーチングによるプログラム設計が一般的だ。一方、近年のAIロボティクスでは模倣学習や推論によって行動を生成するアプローチが主流となっており、この開発思想の違いが既存のロボットSIerの技術・ノウハウをヒューマノイド分野に活かしにくくしていた。
Forcesteed Roboticsはこのギャップを埋めるため、従来のティーチング型ロボット開発とAIロボティクスを同一の実装フローの中で扱えるソフトウェアとしてForcesteed-LEIVORを開発した。同社は「産業用ロボット領域における統合コントローラの思想をヒューマノイド分野に拡張した位置付け」と説明しており、一部の先端プレイヤーや研究開発用途にとどまらず、現場がPoC(概念実証)を進めやすくすることを目指している。
3つの主要機能と対応ロボット
Forcesteed-LEIVORの主な特徴は3点ある。
1.複数のヒューマノイド・セミヒューマノイドに適用可能な「汎用ヒューマノイドコントローラ」として設計
従来型プログラミングと模倣学習型のハイブリッド構成を採用し、ロボット機体ごとに開発環境が分断されない共通の開発基盤として機能する。現時点ではugo、RealMan、Unitreeのロボットに対応しており、今後も対応機種を順次拡張する予定だ。
2.既存のロボットSIerが持つ人材や技術をそのまま活用できる環境
産業用ロボット・協働ロボットの現場で培われてきたティーチングやプログラム設計の考え方を活かしながら、ヒューマノイド向けの動作設計や業務実装を進める。
3.人の作業データを用いた模倣学習や状況に応じた推論処理を組み込む
VLAモデルを活用したロボット制御と従来のルールベース制御を組み合わせた柔軟な運用が可能となり、ティーチングのみでは対応が難しい変化する現場業務への適用も視野に入れている。
今後の展開
LeRobotをはじめとしたVLAモデル対応の拡充、画像認識技術および既存パッケージとの統合を進め、実運用に耐えうるロボットシステムの構築を推進する方針だ。
周辺物体との干渉チェック機能や、その他ヒューマノイドへの適用機能についても開発が予定されている。