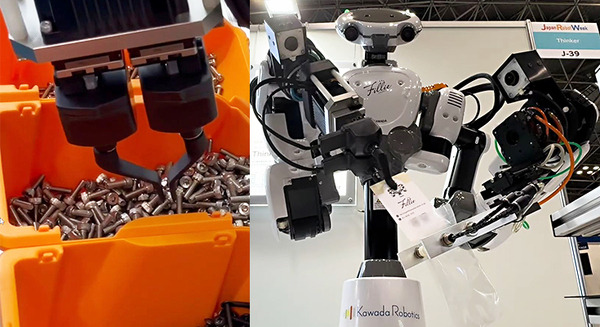

「指先で考えるロボットハンド」で製造現場の革新に取り組んでいる株式会社Thinker(シンカー)は、ユアサ商事株式会社と共同で、近接覚センサーを使ったバラ積みピッキングロボットを開発したことを発表した。「近接覚センサー」は吸着パッドを用いつつ、その場でそのつど非接触のまま、対象物の距離や姿勢を把握できる。
ユアサ商事とThinkerが近接覚センサーを用いた吸着式ロボットシステムを開発
なお、Thinkerはカメラなし独自センシング(近接覚センサー)の開発と製品化を進めているが、同日のユアサ商事の発表によれば「近接覚センサー」に加えて「2Dカメラ」も併用できるとしている。
薄く壊れやすい製品のピッキングも可能
これまで、薄く繊細な成型物(せんべいやクッキー、薄型の樹脂成型品等)は破損しやすく、ピッキングの自動化が難しい分野とされてきた。今回の両社の開発によって、近接覚センサー(ロボットの指先センサー)と二次元(2D)カメラを利用したシステムで、対象物への距離感を素早く解析してスピードを調整することが可能となった。この繊細な動きの制御を利用し、薄く繊細な成型物であっても破損を抑制するピッキングの自動化を実現した。これは製造業の省人化への貢献が期待できる。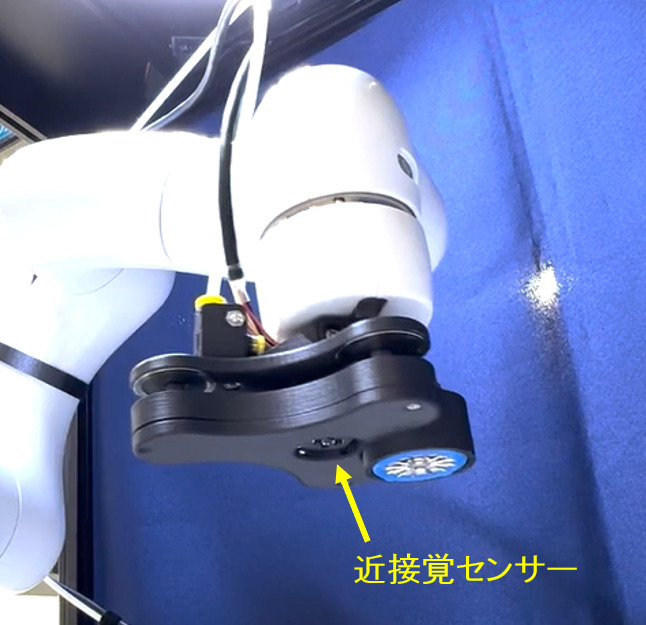
製造業では人手不足の対策として、協働ロボットを用いた生産工程の自動化がテーマとなっている。しかし、クッキーや煎餅、薄型の樹脂成型品、金属部品のような一部の繊細な製品に関しては、従来のカメラシステムに頼ったロボットハンドでは対象物に対する距離感の把握が難しいことから、破損や損壊などを引き起こすことが少なくなかった。その影響により、生産ラインから人の手による作業を完全になくすことができず、「一部の自動化」にとどまっているケースもあった。
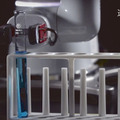
こうした課題に対して、ユアサ商事とThinkerは、吸着パッドを用いつつ、その場でそのつど非接触のまま対象物の距離や姿勢を把握できるThinkerの「近接覚センサー」を活用することで、破損や損壊リスクを大幅に軽減。低コストかつ高速で、壊れやすいプロダクトをピッキングできるロボットシステムを構築し、「薄く壊れやすいプロダクトのピッキング」の課題解決にいたった。
なお、ユアサ商事のリリースによれば、「近接覚センサー」に加えて「2Dカメラ」も併用することができる。
今後は、製造現場での実証試験を経て仕様を確立し、早期の製品化を目指す。
なお、近接覚センサーを用いたこの新開発のロボットシステムは7月5日(金)・6日(土)に開催される「関東グランドフェア2024」で展示する。煎餅等のばら積みピッキングのデモが披露される予定。
フェアの詳細は後述。
Thinkerの近接覚センサー
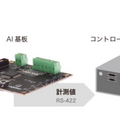
カメラを用いることなく、赤外線とAIを組み合わせた独自の高速・高分解能なセンシングにより、モノの位置と形を非接触かつ高速に把握できるセンサー。
これにより、従来の産業用ロボットでは難しいとされていた鏡面・透明物質の取り扱いや、現場環境に応じた臨機応変なピックアップが可能となり、ロボットハンドによるピッキングの可能性を飛躍的に広げることができる。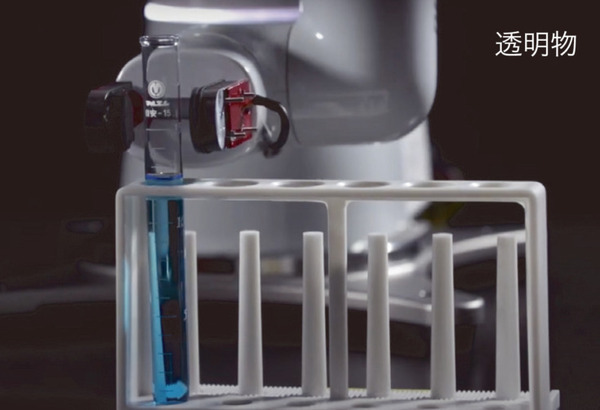
また、ティーチング(ロボットに作業を教え込む工程)の時間や労力を大幅に軽減できることから、これまでとは異なる領域でのロボットハンドの活用も期待されている。
■ロボットハンドが人間の手を超える――Thinker「近接覚センサー TK-01」
■動く対象物をセンシングすることで把持部が追従する動画
ユアサ商事が販売先および仕入先とともに開催する展示会。グランドフェア2024は2024年7月から9月までの期間に関東、東北、中部、九州、関西、タイ・バンコク(2025年2月開催)6か所での開催が予定されている。300 社を超えるメーカーの最新商品・最新技術を一堂に展示。
会期:7/5(金) 10:00 – 17:00
7/6(土) 9:30 – 16:00
会場:幕張メッセ(9~11ホール)(出展場所:テーマゾーン モノづくり(製造) AI・ロボット)
会場案内図:https://grandfair.jp/gf2024/venue/kanto/data/gf2024_map_kanto.pdf
テーマゾーンMAP:https://grandfair.jp/gf2024/venue/kanto/data/themezone_map_kanto.pdf
公式URL:https://grandfair.jp/gf2024/venue/kanto/