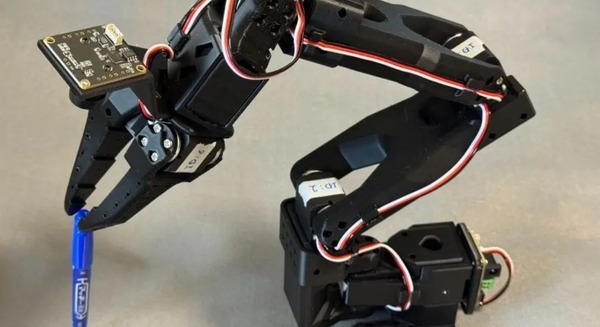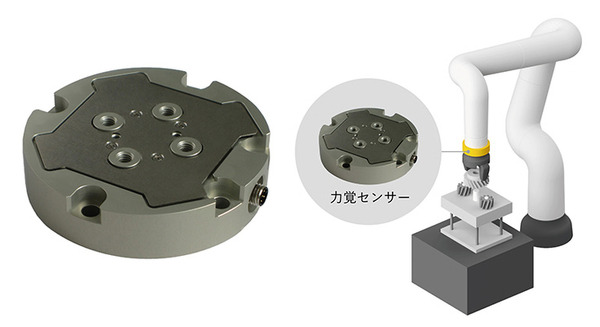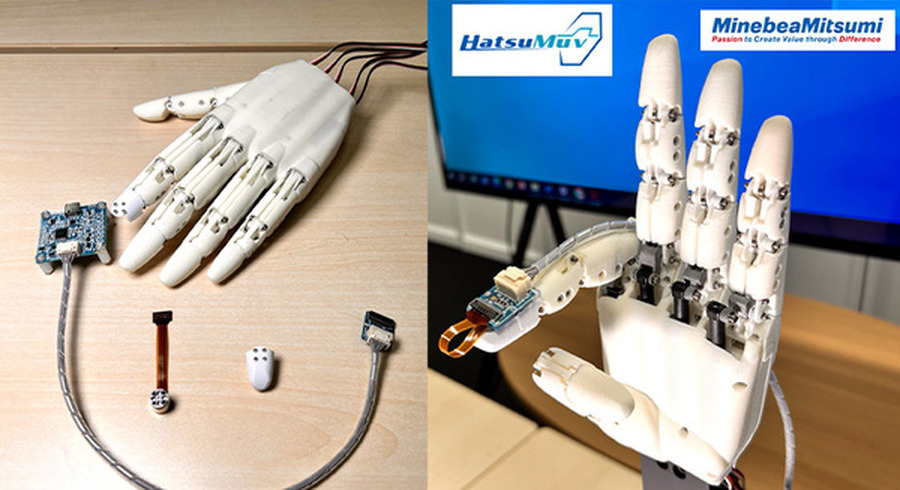






HatsuMuvは、同社のロボットハンド「HatsuHand」にミネベアミツミの小型6軸力覚センサー「MMS101」を組み込み、実験的なテストを実施した。
今回行った実験により、HatsuHandの操作とセンサー反応を確認し、ミネベアミツミ製センサーがHatsuHandに対応可能であることが証明された。これにより、今後のHatsuHandの活用可能性が一層広がったとしている。
実験内容と組み込み手順
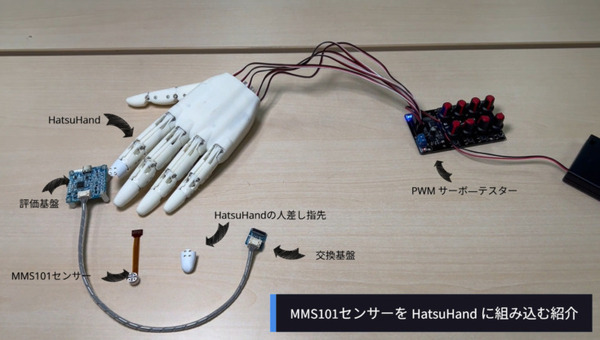
HatsuMuvは、HatsuHandにミネベアミツミ製6軸力覚センサー「MMS101」を組み込む実験を実施した。
この実験では、MMS101センサーをHatsuHandの人差し指に組み込み、センサーの取り付け過程とその動作を詳細にテストした。センサーに対応したHatsuHand専用指先のSTEPファイル(3D CADデータ)を、GitHubで無料公開している。
センサー動作テストと評価
センサーの組み込み後、HatsuHandの動作を複数の把持・接触のケースでテストした。HatsuHandが物体を把持した際に、加わる力に応じたセンサーの反応を評価用アプリ「ForceSensorEvaluationProgram」を通じてリアルタイムでモニターに表示した。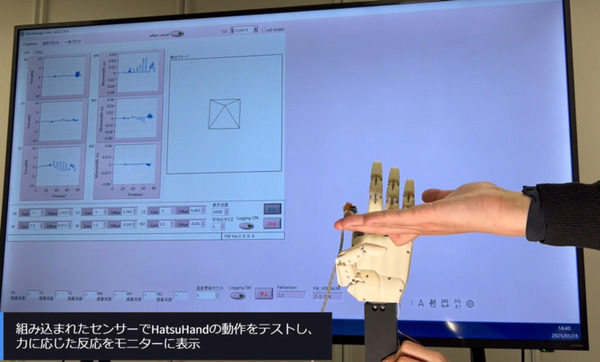
力に応じた変化をMMS101センサーがリアルタイムで測定し、その測定結果はモニターに可視化されていた。これにより、センサーの精度およびHatsuHandとの適合性が確認できた。
今後の展望と可能性
今回の実験結果により、MMS101センサーがHatsuHandに対応可能であることが確認され、今後、研究用途への応用が期待されている。また、HatsuMuvでは、新たな製品との組み合わせによる実験や、プロジェクト・研究に関心のある企業や研究機関からの相談を受け付けているとのことだ。
HatsuMuvは、2025年5月8日(木)・9日(金)に東京ビッグサイトで開催される、日本最大級のスタートアップ展示会「Startup JAPAN 2025」に出展する。「Startup JAPAN 2025」では、紹介したロボットハンド「HatsuHand」も展示を予定している。
ブリヂストンがゴム人工筋肉のソフトロボットハンドのデモ動画3本を公開 物流・製造・小売で柔らかい手の可能性示す
キューティーロイドから生まれた人間の手に近い高性能小型ロボットハンドを義手に活用 可能性を示す動画を公開
人間と同等サイズで低価格の5指ロボットハンド「CR Hand」を販売開始 13関節6モーターで多彩な動き Curious Robotics
「電球も柔らかくしっかりつかむ」ラティス構造のロボットハンドツール「柔軟指」研究のKiQ Roboticsとリックスが共同開発を開始
キヤノン、ロボットに人の手のような感覚を持たせる力覚センサー「FH-300-20」を発売へ 薄型・軽量と高精度を両立