
株式会社NTTドコモ(以下、ドコモ)と慶應義塾大学ハプティクス研究センターは、慶應大が開発したロボティクス技術「リアルハプティクス」を活用し、MECに搭載したネットワーク遅延対策機能とドコモの商用5Gのモバイルデータ通信を組み合わせ、繊細な力加減を必要とし物に触れた時の手応えが伝わるロボットの無線遠隔操作を安定した動作で行うことに、日本で初めて成功した(2025年10月7日時点、ドコモ調べ)。
3つの技術要素を組み合わせた新手法を開発
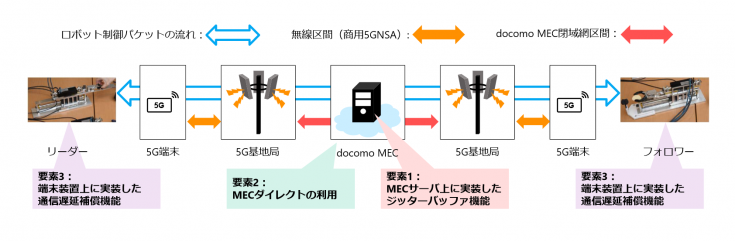
今回の実証実験では、モバイルデータ通信の遅延や変動を抑えるために、ドコモが開発したジッターバッファ機能と、docomo MECのMECダイレクト機能、慶應大が開発した通信遅延補償機能の3つの技術を組み合わせて併用するという新しい手法を採用している。
ジッターバッファ機能は、通信経路で発生する遅延の変動を均一化し、がたつきの影響を低減してロボット操作の滑らかさを改善する。MECダイレクトを利用することで、データパケットを外部のネットワークを経由することなく送受信することが可能だ。通信遅延補償機能は、通信遅延によって生じた力のノイズを予測モデルによって除去する技術である。
実証実験で安定的な遠隔操作を確認
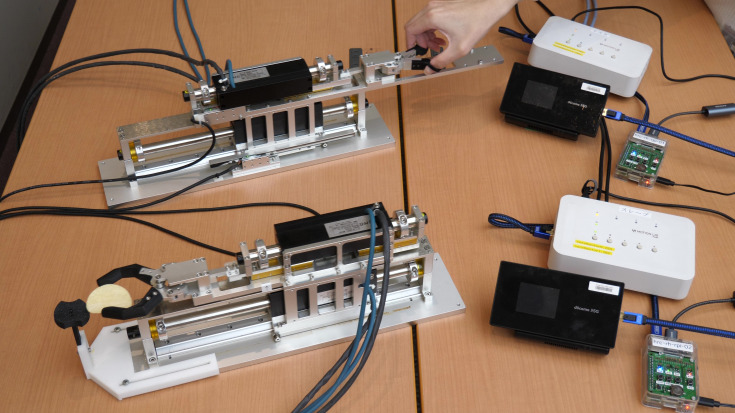
本実証では、ドコモ商用5G(NSA)を使い、リーダー・フォロワーと、ドコモが現在開発を進めるロボット用独自プラットフォームを実装したdocomo MEC上の仮想サーバとを接続したネットワーク構成で実験を行った。
ハンド型のフォロワーとその操作部であるリーダーを用いて、割れやすい菓子であるポテトチップスを定められた時間内に把持し、運搬するという定型的なタスクを実施し、新規手法の適用時と非適用時における結果を比較した。
新規手法の非適用時は、通信経路において付加される通信遅延とその変動によって、手応えのフィードバックが不鮮明になる、ロボットの操作が重くなる、がたつくなど、ロボットの遠隔操作は不安定に。その結果、把持対象物であるポテトチップスを割ったり、落とすなどで時間内のタスク完遂が困難であった。
一方、新規手法の適用時は、docomo MEC上に実装したジッターバッファ機能と端末装置上に実装した通信遅延補償機能とが連携的に作用することで、フィードバックの鮮明さや、ロボットの操作の重さやがたつきが改善された。その結果、安定的な遠隔操作で、把持および運搬のタスクを時間内で容易に完遂することが可能となった。
次への展開と期待される用途
本実証により、ドコモが開発した通信制御システムとモバイルデータ通信を組み合わせたロボットの遠隔操作の実用性が確認され、今後のユースケース拡大や実装につながると期待される。
本システムをdocomo MECを通じてサービスとして提供することで、ユーザは無線遠隔ロボットソリューションおよびサービスの開発や運用をより少ない負担で行うことが可能となり、参入や導入のハードルを下げることにつながる見込みだ。
ドコモと慶應大は、高度なロボットの無線遠隔操作ユースケース創出と社会実装に向け、リアルハプティクス(慶應義塾大学ハプティクス研究センターの大西公平特任教授が発明した現実の物体や周辺環境との接触情報を双方向で伝送し、ヒトの力加減をロボット上で再現する技術)をはじめとするロボット制御技術や通信の低遅延化技術などの開発、開発技術を活用したユースケースの実現に向けて今後も取り組む方針である。
なお、本実証で用いたドコモの技術と「リアルハプティクス」を組み合わせる技術の取り組みは、2025年10月9日(木)からNTTドコモビジネスが開催する「NTT docomo Business Forum’25」にて紹介される予定だ。
【日本初】ドコモと慶應大学が力触覚をロボットに活用したデモを公開 5GとMECで力加減を適切に操作できる無線自律制御に成功
ドコモ/ユカイ/アスラテックら、6G 「AIのためのネットワーク」で3タイプのコンセプトモデルロボットを開発
NTT・ドコモ・NEC 高速移動時でも通信品質の低下を抑える技術の開発に成功 40GHz帯~ミリ波で分散MIMOによる高速通信に活路
この記事を読んだ人におすすめ










ABOUT THE AUTHOR /
杉田 大樹PR


このカテゴリの新着記事





注目のロボット









注目のロボット企業







連載・コラム

