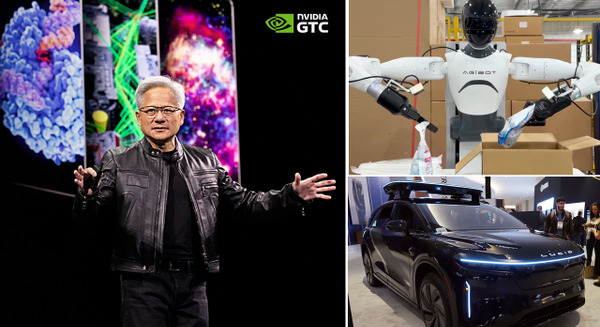






NVIDIAが基調講演でヒューマノイド開発プラットフォーム「GR00T」(ジーアールゼロゼロティー)を発表したことは既にお伝えしたが、今回、ロボティクス開発の新技術に関する発表は3つあった(GR00Tについては前出の記事「NVIDIAがヒューマノイド開発プラットフォーム提供を発表 ディズニーの二足歩行ロボットが登壇 Jetson Orinから次世代Thorへ」を参照)。
ロボティクス分野で発表された3つのトピック
技術的にはヒューマノイド開発向けの「GR00T」、マニピュレータ等向けの「Isaac Manipulator」、自動搬送ロボットなどビジョン・カメラ開発向け「Isaac Perceptor」だ。この3つの技術はそれぞれがトピックであると同時に、連携して3つの技術を活用するとヒューマノイド開発を更に加速できるトピックでもある、という見方ができる。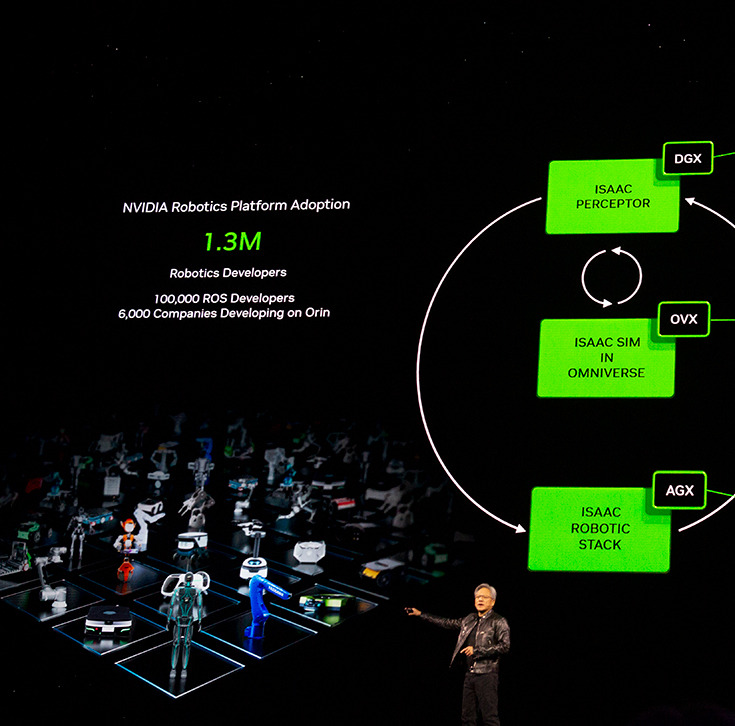
デジタルツイン「Omniverse」との連携
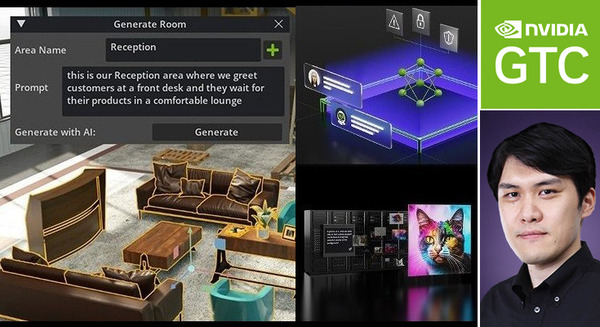
ロボットに搭載されるAIは、障害物を避けたり緊急時に停止するなどの安全な走行、最適なルート、複数台のロボットの群管理など、「NVIDIA Omniverse」で生成されたデジタルツイン(仮想環境)の中でリアルタイムにテストを重ねられる。特に工場、倉庫、サプライチェーン全般などで、現実世界でロボットをトレーニングするのは非常にコストがかかり、リスキーなため、デジタルツイン環境でAIが動作を事前に学習することは有効だ。
このワークフローは、開発者が複雑なAIを訓練したり、評価するために使用し、デジタルツイン内で安全性や性能を確保した上で、現実世界の現場にリリースされる。
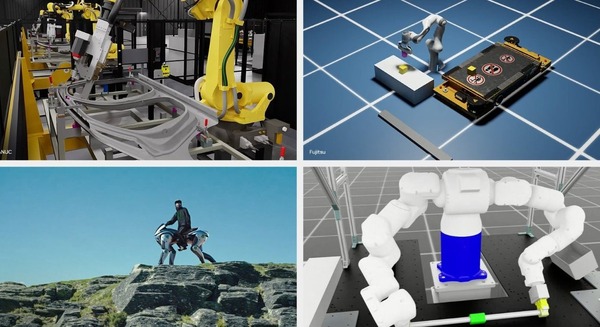
今回の「GTC」で公開された下記の動画では、「NVIDIA Metropolis」(ビジョン)、「Omniverse」(デジタルツイン)、「CuOpt」、ロボット知覚シミュレータ「Isaac」を活用して、ロジスティックの現場でロボットの自動化を実現するためのコンセプトが紹介されている。
■ Fusing Real-Time AI With Digital Twins
別の視点からの3つのトピック
3つのトピックに話を戻すと、3つのトピックを、ヒューマノイド開発向けの「GR00T」、Isaacプラットフォームのメジャーアップデート「Isaac Lab」と「OSMO」、前述のマニピュレータ向け「Isaac Manipulator」とAMR向け「Isaac Perceptor」、と分類することもできるだろう。以下、後者の3トピックに分けて更に解説しよう。
ヒューマノイドロボット開発向けのプラットフォーム「GR00T」
一つ目は人型のヒューマノイドロボットを開発するためのスタック「GR00T」(プラットフォームモデル)と、それを構成するソフトウェア、複雑で重たい負荷の作業をこなす新しいSoC「Jetson Thor」の発表だ。リリース時期は2025年前半。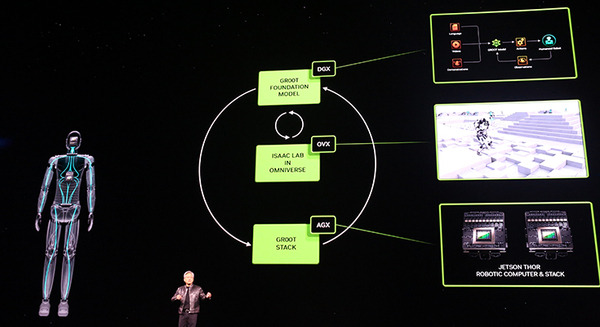
これがリリースされれば、ヒューマノイド開発の敷居が下がり、多くの開発者や研究者が開発する機会が得られる可能性が上がると期待できる。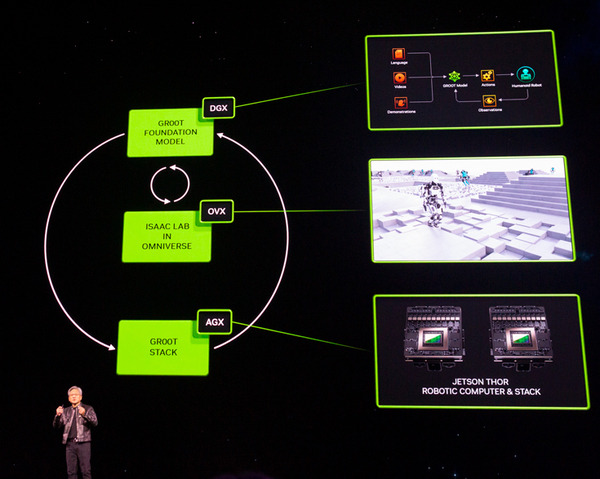
「Isaac Lab」と「OSMO」
ふたつめは「Isaac Lab」。前回の記事でも「Isaac」プラットフォームのメジャーアップデートと伝えたが、そのひとつが「Isaac lab」で「Omniverse」ベースで、ロボットの動きのシミュレーションで強化学習を行うことができる。また、オーケストレーション サービスの「OSMO」も発表されている。
高精度なAIモデルの開発に、最近は強化学習が用いられることが多いが、トレーニングには膨大な実データや仮想(合成)データが必要となる。「Isaac Lab」は、この課題を解消するため、特にロボット学習のための数千の並列シミュレーションを実行するために「Isaac Sim」上に構築され、高速のGPUで迅速に処理できる軽量パフォーマンスを最適化したアプリケーションとなっている。
また、多くのコンピューティングで分散してロボット開発を行うために「分散した環境全体」でデータを生成したり、トレーニングしたり、ソフトウェアやハードウェアのワークフローを調整して最適化する機能が「OSMO」のようだ。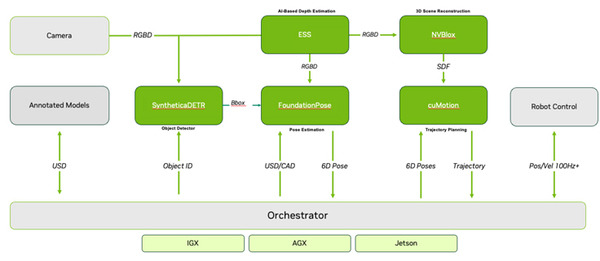
「Isaac Manipulator」と「Isaac Perceptor」
3つ目は「Isaac Manipulator」と「Isaac Perceptor」だ。ロボット工学の事前トレーニング済みモデル、ライブラリ、リファレンス、ハードウェアのコレクションで構成されている。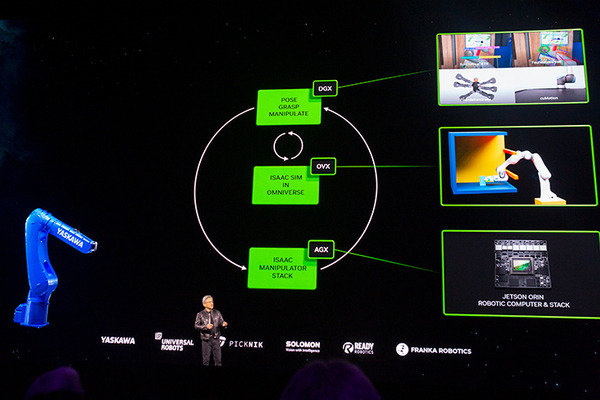
Isaac Manipulator
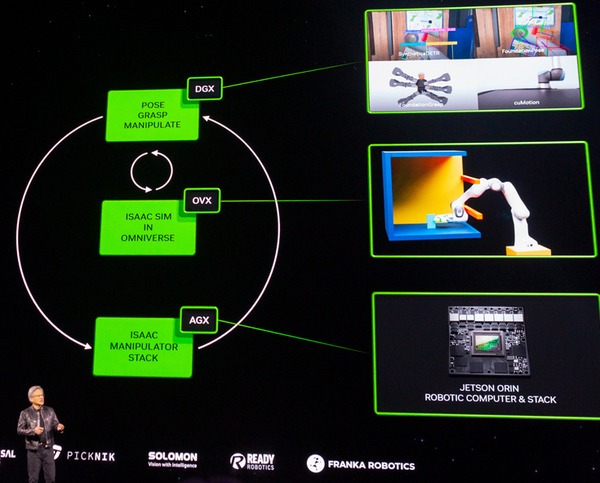
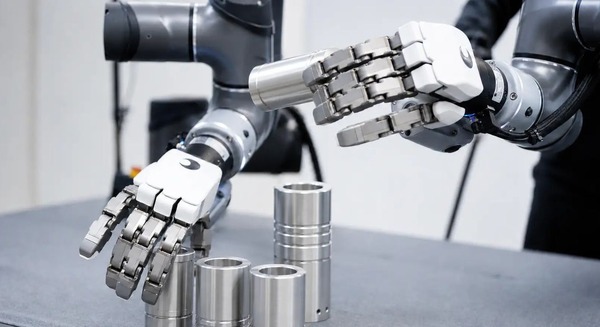
「Isaac Manipulator」は、マニュピレータ向けの基礎モデルとGPUによって高速化されたライブラリで構成され、ロボット・アームに対して器用に動くAI機能を追加する。開発者は多くの新しいタスクを自動化できる、としている。
初期のエコシステム パートナーには、Franka Robotics、PickNik Robotics、READY Robotics、Solomon、Universal Robots、そして安川電機の名前が挙がっている。
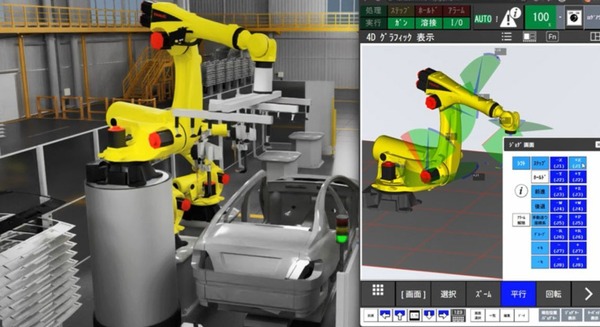
安川電機はAIロボットに注力することを公言しており、数日前もプレスリリースを通じてNVIDIAと連携し、GTCにロボットを展示することを発表しており、実際にGTCの展示会場では同社の青いロボットが動作していた。
■安川電機のデモ
安川電機の小川正博社長は「NVIDIAのAIツールと機能を、安川電機のオートメーション・ソリューションに導入することで、業界全体でロボットを導入できる限界を押し広げます。これはさまざまな業界に大きな影響を与えるでしょう」と述べている。
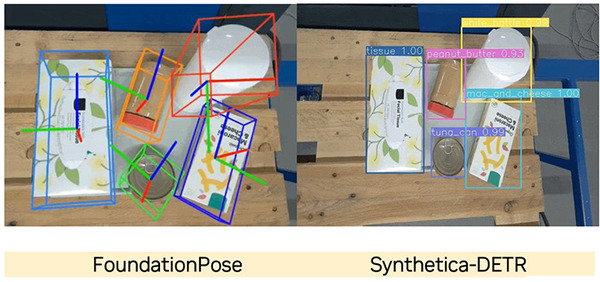
● FoundationPose
6D姿勢推定とこれまで見えなかったオブジェクトの追跡のための先駆的な基礎モデル。
● cuMotion
NVIDIA GPUの並列処理を利用して、多くの軌道の最適化を同時に実行し、最適なソリューションを提供。
● FoundationGrasp
未知の3Dオブジェクトの把持を予測するトランスフォーマー・ベースのモデル。
● SyntheticaDETR
新しいオブジェクトの迅速な検出、レンダリング、トレーニングを可能にする屋内環境用のオブジェクト検出モデル。
Isaac Perceptor
「Isaac Perceptor」は、マルチカメラの3Dサラウンドビジョン機能を提供するもの。主に工場や倉庫、敷地内での自動搬送ロボットなどに有効な機能だ。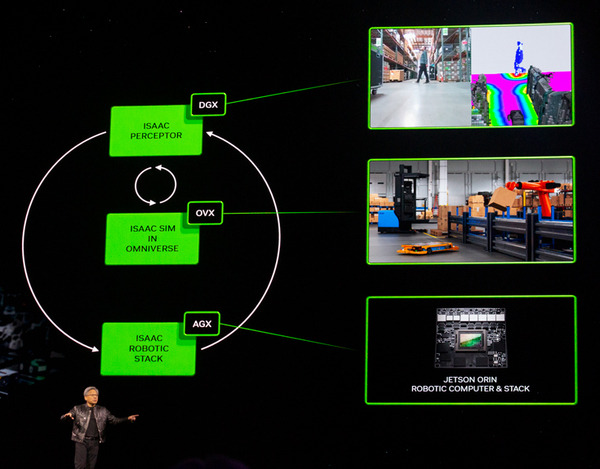
パートナーは、ArcBest、BYD、KION Group などの企業の名前が挙がっており、新しい高度なビジュアルAI機能のマテリアル ハンドリング業務で新世代の自律性を実現することを目指すとしている。新しい「Isaac プラットフォーム」機能は次の四半期に利用可能になる予定としている。
■NVIDIA Isaac Perceptor 3D Surround Vision
NVIDIA 大規模言語モデルと生成AIにも特化した「Blackwell プラットフォーム」とは 性能向上は最大30倍、コスト/エネルギー消費は最大1/25に
NVIDIA 自動運転開発環境に生成AI対応の次世代Blackwellアーキテクチャ搭載「DRIVE Thor」を採用 世界最大のEVメーカーBYDとの連携強化
NVIDIA ヒューマノイド・マニピュレータ・自動搬送ロボット向けに「Isaacのメジャーアップデート」を発表 安川電機が「GTC 2024」でデモ展示
NVIDIAがヒューマノイド開発プラットフォーム提供を発表 ディズニーの二足歩行ロボットが登壇 Jetson Orinから次世代Thorへ
VIDIAが量子コンピュータ開発を支援する「NVIDIA Quantum Cloud」開始 暗号化にGPUの並列処理を活用する「cuPQC」も
「GTC 2024」展示ホールはヒューマノイドなど次世代の情報を求めて超満員 現地の様子を写真と動画で体験
いよいよ明日開幕!世界最大級のAIとGPUイベント「NVIDIA GTC 2024」現地直前レポート、サンノゼの青空の下で
世界最大級のAIとGPUイベント「NVIDIA GTC 2024」リアル/オンラインで開催 GTCの全容と日本から参加できる見どころ徹底解説
NVIDIA 日本向けイベント「Japan AI Day」3/22にオンライン開催 生成AI・LLM・デジタルツイン・エッジAIなど12講演 大手企業も登壇
NVIDIA GTC2024関連記事(ロボスタ)