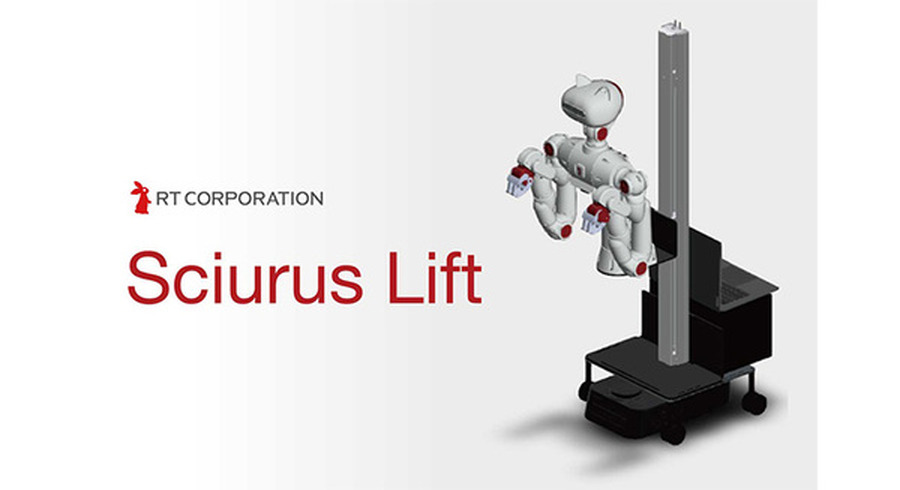


アールティは、AIによる作業の研究開発用双腕上半身ロボット「Sciurus17」の新たなオプションとして、「Sciurus Lift」を開発し、2025年6月より受注生産を開始する。既存のSciurus17が持つ高度な双腕作業能力に加え、自由な昇降機能と移動能力を搭載しており、模倣学習をはじめとする、より実践的な研究開発を強力にサポートする。
アイデアを形にするリフト機構「Sciurus Lift」
Sciurus Liftは、研究者や学生が直面する「手が届けば」「移動できれば」という課題を解決するために誕生した。部品の取り出しから、家庭内でのタスク、レストランでのサービス、工場の部品仕分けや組み立てまで、幅広いシーンを想定した研究開発に活用することができる。
Sciurus Liftが研究にもたらす革新的な特長
【高さの制約を克服】70cmほどの昇降機能により、ほぼ人間の手が届く範囲の高さの異なる環境への適応が容易に。これまで制約されていた実験セットアップも自由自在。
【移動の制約からの解放】手持ちの移動台車(kachaka他、各種対応可能)と組み合わせることで、実験室内のあらゆる場所へスムーズに移動。モバイルマニピュレーション研究を加速させる。
【ROS 2で広がる可能性】最新のROS 2開発サンプルを豊富に搭載。二次開発が容易で、あなたの独創的なアルゴリズム実装を強力にバックアップする。
【二つの腕で、より人間に近い作業を】人型ロボットならではの双腕作業により、複雑なタスクや協調作業の研究開発に最適。模倣学習、強化学習、画像認識といった最先端の研究を強力に推進する。ハンドも交換可能なため、3Dプリンタで開発したハンドを取り付けることも可能。
【実践的な研究フィールド】 キッチン、片づけ、レストラン、部品仕分け、組立など、現実世界の多様なシーンを研究室で再現可能。より実用的なロボット技術の開発に貢献する。
【世界への挑戦】RoboCup@HomeやRoboCup Industrial Logisticsへの出場機体としても活用可能。自身の研究成果を世界に示すチャンスが広がる。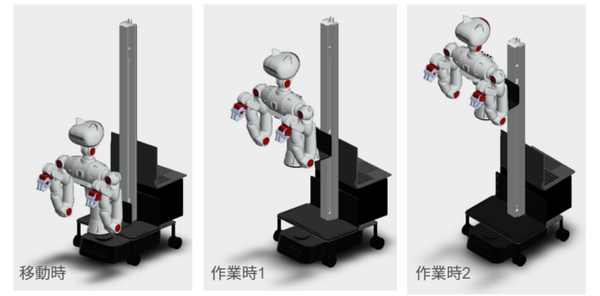
「Sciurus Lift」は、以下のような研究テーマに最適
模倣学習: 人間の動作をロボットに学習させ、複雑なタスクを実行させる研究
強化学習: 試行錯誤を通じて最適な行動戦略をロボットに獲得させる研究
画像認識: カメラなどのセンサー情報から環境を認識し、タスクを実行する研究
双腕作業: 二つの腕を協調させて、より高度な作業を実現する研究
モバイルマニピュレーション: 移動しながら物体を操作する、より実用的なロボットシステムの開発
対象ユーザー
大学・高専の研究室に所属する研究者、教員、学生
企業の研究所に所属するロボット研究開発者
Sciurus Lift 主な仕様
| 名称 | Sciurus Lift |
|---|---|
| 型番 | S17-LIFT |
| 備考 | Sciurus 17本体、移動台車は別売り |
| 上下動リフト | 70㎝ 1本 |
| 接続部品 | 各種金具、ケーブル類 1セット |
| バッテリー | 1台 |
| 説明書 | オンライン 1式 |
| サンプルソフト | ROS 2(基本的な移動+作業のサンプルはカチャカProを前提として作成) |
工業教育向け「ROS 2」と「生成AI」ロボット教材の開発でアールティとバイナスが連携 工業高・高専、職業訓練校向け
アールティが国産4足歩行ロボットの開発に着手 受注生産で2025年度内の発売を予定
組み込みデバイス向けROS 2を学ぶ「micro-ROS入門講座」 アールティが新たに開講
アールティ関連記事
株式会社アールティ