




国立大学法人筑波大学は7月7日、サイボーグ型ロボットの装着者が「自らロボットを動かそうとする意思」を持つ時、高次な動作の計画や準備を制御する運動前野などの脳領域が活発に働くことを、ロボット動作中の脳計測により世界で初めて明らかにしたと発表した。
ロボットによるリハビリテーションが脳の再構築を促す
病気やけがで手足が動かしにくくなった人を対象としたロボットによるリハビリテーション治療は、身体の動作補助に加え、脳の再構築(神経可塑性)を促す手段として注目されている。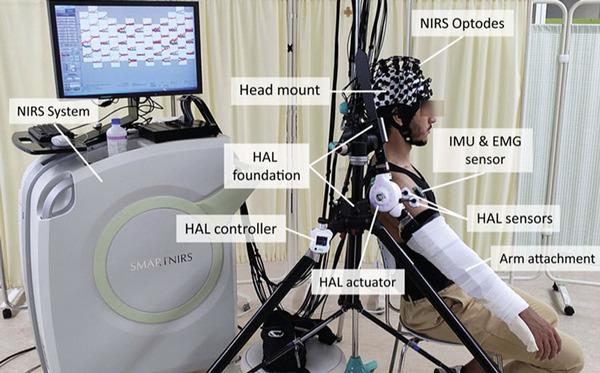
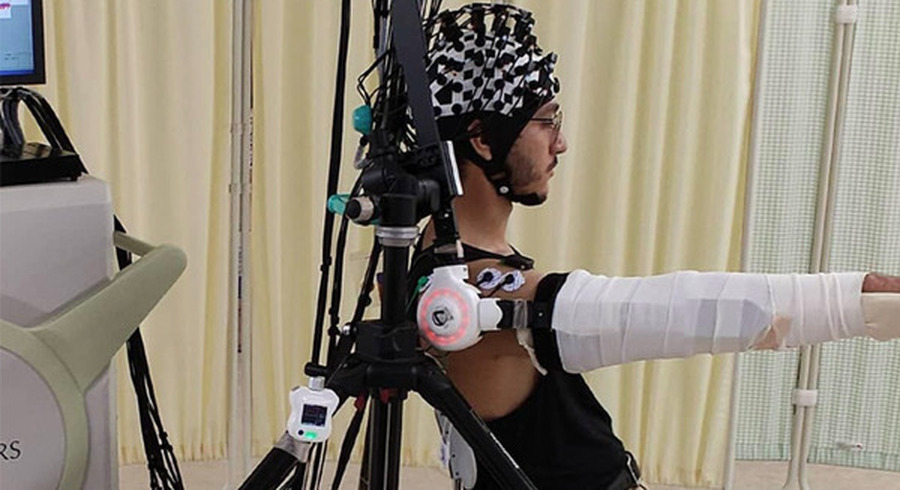
ロボットに「ただ動かされる」場合と「自分で動かそうと考えながら使う」場合で、それぞれ脳がどのように反応するかは十分にわかっていなかった。研究チームは、健康な人に腕を上げる動作をしてもらい、脳の活動をCYBERDYNE株式会社の装着型サイボーグHALを用いて調べた。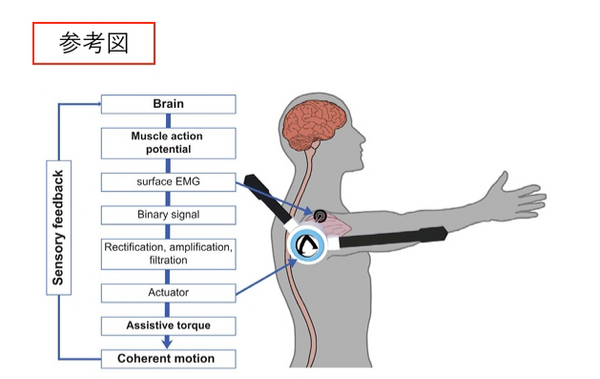
自力動作、ロボットによる能動的支援と受動的支援の3つを比較
本実験では健常な成人20人を対象とし、肩関節により腕を上げる運動における脳活動の違いを三つの条件で調査した。一つ目は自力で腕を上げる「自発運動」、二つ目は「自分で動かそうとする意思」を持ちながらロボットに動作を補助してもらう「能動的ロボット支援」、三つ目は完全にロボット任せで動かされる「受動的ロボット支援」である。
各条件の脳活動を、頭皮に装着したセンサーを通じて脳の血流を測定する機能的近赤外分光法(fNIRS)という非侵襲的な方法で測定した。
能動的ロボット支援では前頭葉の高次運動野が自発運動同様に活性化
実験の結果、自発運動と能動的ロボット支援では、運動の計画・準備に関わる前頭葉の高次運動野(運動前野、補足運動野)で明確な活性化が確認された。
動かす腕と同側の一次運動野や感覚運動領域の活性は感覚‐運動のネットワーク構成のために重要であるという知見が報告されている。それらの知見を裏付けるように、本研究においても自発運動や能動的ロボット支援ではこれらの領域で有意な活動が観察された。
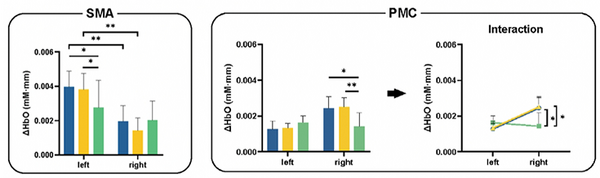
受動的ロボット支援の条件では、高次運動野および同側半球の活動は顕著に低く、運動意思の有無が脳の働きに大きな影響を与えることが明らかになった。
臨床応用への示唆
外骨格ロボットの臨床効果を厳密に解析したレビュー論文によると、運動意思に応じて能動的に支援する装着型サイボーグHALは、受動的な支援をする他のデバイスと異なり、神経可塑性を誘導し全身的な治療効果を示す唯一の機器だと報告されている。
今回の結果は、ロボット支援設計において、装着者がロボットに動かされるのではなく、装着者自らが動こうとする意思を取り入れることが、脳の広範な感覚‐運動のネットワークを広げ、より効果的に脳の活性化や神経可塑性を引き出す鍵であることを示唆している。
意思駆動型ロボットの開発へ
今回の研究は、「動かされる」から「動かそうとする」への転換が脳の広範な活性化を導くことを示した。今後は、患者の運動意思をリアルタイムに検出し、それに応じてロボットが動作を支援する「意思駆動型」のロボット治療技術の展開が期待される。
筑波大学は、人とロボットが一体となり、意思に応じて動作を調整するサイボーグ型ロボット支援技術が、医療の可能性を拡張する鍵となることに期待を示している。