
ブルーイノベーション株式会社、九電ドローンサービス株式会社、株式会社東日本テクノサーベイの3社は、2025年6月3日(火)に宮城県仙台市の東北電力 人来田発電所導水路において、自動走行ロボット(AGV)を活用した導水路内部点検の実証実験を実施したと発表した。
実証実験の背景と目的
水力発電所の導水路では、これまで人が内部に立ち入って行う目視点検が主流だったが、作業負担・安全リスク・効率性の面で課題が指摘されてきた。この課題解決に向けて、3社はAGVによる自動点検の実用化を目指し、継続的に技術検証を行っている。
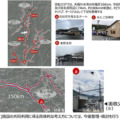
本実証は、2024年6月にブルーイノベーションと九電ドローンサービスが共同発表した点検用AGV開発に関する取り組みの延長線上に位置づけられるものである。今回は東日本テクノサーベイが現場管理のもと東北電力の協力を得て、同社人来田発電所の導水路環境において、実運用を想定した走行性能、撮影性能、可搬性を総合的に検証した。

実証実験の成果
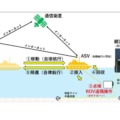
実証実験は約900m区間の導水路で実施され、AGVによる往復自動走行と障害物検知による自動折返し機能の有効性を確認した。走行速度は0.5m/sに設定し、自己位置補正機能によって壁面への接触を避けながら、安定した中央走行が可能であることを実証している。
導水路内は水位約10cmの環境下だったが、AGV本体がIP67相当の防水性能を有しており、搭載機器にも防水対策を施しているため、水環境下においても問題なく走行・撮影が可能であることが判明した。
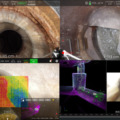
撮影用カメラおよびFPVカメラによる映像・画像の記録により、導水路内部の状況を十分に把握可能なことも確認できた。
さらに、AGVの総重量は約20kgと軽量で、作業員2名での搬入・搬出が可能であることから、特別な重機を必要としない高い可搬性も評価されている。
今回の実証で得られた知見や課題を踏まえ、現場からの要望に即した機能開発を優先的に進め、実運用に向けた完成度の向上を目指し、3社は今後も協業を強化していく方針である。
屋内点検用の球体ドローンELIOS 3で点検効率向上!高精度自動復帰機能を搭載 ブルーイノベーション
この記事を読んだ人におすすめ






ABOUT THE AUTHOR /
杉田 大樹PR


このカテゴリの新着記事




注目のロボット









注目のロボット企業







連載・コラム

